Как рисовать робота для ребенка • Makusha
Chibis (Chibi/Чиби)
Вот красивый рисунок, который я сделала пару дней назад. Это одна из моих любимых концептуальных
Дисней
Привет народ. Добро пожаловать на еще один урок, сделанный мной для всех вас. В любом случае,
С тех пор, как я загрузил урок по чиби, люди просили меня сделать больше
Животные аниме
Всем привет! Ребята, вы готовы научиться рисовать милых австралийских животных? Сегодня мы нарисуем симпатичную коалу
Для детей
Как насчет нового урока, который покажет вам, ребята, как легко рисовать зайца поэтапно? Я
Chibis (Chibi/Чиби)
Привет еще раз, и добро пожаловать на очередной веселый урок рисования от makusha. ru. Я
ru. Я
Исполнитель Робот — Среда программирования Кумир
Настройка среды Кумир для исполнителя Робот.
Запущенная программа Кумир выглядит так.
Первым делом мы должны раскомментировать первую строку нашей программы, убрав символ |
Таким образом, программа станет выглядеть так:
использовать Робот
алг
нач
кон
Удалив символ |, мы тем самым указали Кумиру на то, что будем работать с исполнителем Робот. Если этого не сделать, то при написании программы мы столкнемся с ошибкой «Нет такого алгоритма». Поэтому очень важно при создании новой программы раскомментировать первую строку. Теперь все готово для дальнейшей работы.
Но перед началом, нам необходимо задать стартовую обстановку Робота и познакомиться с простыми командами исполнителя Робот.
Стартовая обстановка Робота
Перед началом выполнения программы необходимо задать исполнителю Робот стартовую обстановку. Это значит установить Робота в нужную позицию, расставить стены, закрасить нужные клетки и т. п. Этот шаг очень важен. Если его проигнорировать, то программа может работать неправильно или вообще завершится аварийно.
Это значит установить Робота в нужную позицию, расставить стены, закрасить нужные клетки и т. п. Этот шаг очень важен. Если его проигнорировать, то программа может работать неправильно или вообще завершится аварийно.
Наш Робот находится в некой среде — это клетчатое поле, размер которого известен. Так же на этом поле могут находится стены и закрашенные клетки, а сам Робот может находится в любой клетке. Так вот —
стартовая обстановка задает положение Робота на поле и расположение всех остальных элементов — стен, закрашенных клеток. И перед тем, как писать алгоритм для Робота необходимо задать стартовую обстановку. Насколько это важно давайте рассмотрим на примере. Пусть есть две стартовые обстановки:Стартовая обстановка 1 | Стартовая обстановка 2 |
Отличаются они только тем, что в стартовой обстановке 2 справа от Робота находится стена.
Если наша программа начнется с команды, которая переместит Робота на одну клетку вправо (о простых командах Робота), то в первом случае (стартовая обстановка 1) Робот выполнит эту команду, а во втором программа завершится аварийно, так как Робот не может ходить сквозь стены. Получается, что одна и та же программа в первом случае работает, а во втором приводит к ошибке. Именно поэтому так важно задавать стартовую обстановку для Робота.
Как задать стартовую обстановку?Запустив среду Кумир в меню Инструменты выбираем пункт Редактировать стартовую обстановку Робота
Откроется окно с синим фоном. Это и есть стартовая обстановка Робота. И мы ее можем изменить.
По-умолчанию, размер окна 10 на 15 клеток. Если нам необходимо изменить количество строк и столбцов, то щелкаем Обстановка -> Новая обстановка и задаем необходимые значения
Далее,
- чтобы переместить Робота в новую позицию, щелкаем по нему левой кнопкой мыши и не отпуская ее тащим Робота в нужное место.
- чтобы добавить/удалить стену, щелкаем левой кнопкой мыши по границе клетки.
- чтобы закрасить/очистить клетку, щелкаем по ней левой кнопкой мыши
- чтобы добавить или убрать точку в клетку щелкаем по клетке, удерживая клавишу Ctrl
После того, как мы задали нужную стартовую обстановку, ее необходимо сохранить (Обстановка -> Сохранить или Обстановка -> Сохранить как). После этого закрываем окно Обстановка и в основном окне программы выбираем Робот -> Сменить стартовую обстановку
Находим сохраненную ранее обстановку и загружаем ее. После этого убедимся, что загрузили правильную стартовую обстановку, щелкнув по кнопке Показать окно Робота
Если в окне с зеленым фоном (текущая обстановка Робота) вы увидите вашу обстановку, то можно переходить к написанию алгоритма, используя простые команды Робота.
Исполнитель Робот. Простые команды.
У нашего Робота тоже есть система команд. Сегодня мы рассмотрим простые команды Робота. Всего их 5:
вверх
вниз
влево
вправо
закрасить
Результат выполнения этих команд понятен из их названия:
вверх — переместить Робота на одну клетку вверх
вниз — переместить Робота на одну клетку вниз
влево — переместить Робота на одну клетку влево
вправо — переместить Робота на одну клетку вправо
закрасить — закрасить текущую клетку (клетку в которой находится Робот).
Эти команды можно писать с клавиатуры, а можно использовать горячие клавиши (нажав их команды будут вставляться автоматически):
вверх — Escape, Up (стрелка вверх)
вниз — Escape, Down (стрелка вниз)
влево — Escape, Left (стрелка влево)
вправо — Escape, Right (стрелка вправо)
закрасить — Escape, Space (пробел)
Обратите внимание, что набирать нужную комбинацию горячих клавиш нужно не привычным нам способом! Мы привыкли нажимать клавиши одновременно, а здесь их нужно нажимать последовательно.
Теперь мы готовы написать первый алгоритм для Робота. Предлагаю начать с простого — нарисуем квадрат со стороной 3 клетки. Поехали!
Запускаем Кумир, настраиваем его. Можно начинать писать программу? Конечно нет! Мы же не задали стартовую обстановку! Делаем это. Предлагаю использовать вот такую:
Вот теперь все готово. Начинаем писать программу. Пока она выглядит так
Удаляем символ «|» и называем наш алгоритм «Квадрат»
Предлагаю рисовать квадрат, двигаясь по часовой стрелке. Для начала закрасим текущую клетку, дав команду закрасить. Потом делаем шаг вправо и опять закрашиваем клетку. И еще раз шаг вправо и закрасить.
Попробуем запустить программу и посмотреть что же получилось. Для запуска нажимаем F9 или же кнопку на панели инструментов
В результате мы должны увидеть вот такую картину
Если такое окно Робота у вас не появилось, то на панели инструментов щелкните «Показать окно Робота» или в меню Робот выберите пункт «Показать окно Робота». Продолжаем дальше.
Продолжаем дальше.
Теперь мы будем двигаться вниз и закрашивать правую сторону квадрата:
вниз
закрасить
вниз
закрасить
Потом пойдем влево, закрашивая нижнюю границу квадрата
влево
закрасить
влево
закрасить
У нас осталась одна незакрашенная клетка. Закрасим ее
вверх
закрасить
Все готово! В итоге наша программа выглядит так:
использовать Робот
алг Квадрат
нач
закрасить
вправо
закрасить
вправо
закрасить
вниз
закрасить
вниз
закрасить
влево
закрасить
влево
закрасить
вверх
закрасить
кон
А результат ее работы вот так
Итак, сегодня мы с вами написали программу, используя простые команды Робота. Рекомендую попрактиковаться самостоятельно — придумать себе задание и написать программу. Это могут быть самые различные фигуры, узоры, буквы. К примеру, попробуйте написать программу, рисующую букву П, Р, Ш, Щ, М. А если получится и захотите поделиться — комментируйте и прикрепляйте результат к комментарию.
Рекомендую попрактиковаться самостоятельно — придумать себе задание и написать программу. Это могут быть самые различные фигуры, узоры, буквы. К примеру, попробуйте написать программу, рисующую букву П, Р, Ш, Щ, М. А если получится и захотите поделиться — комментируйте и прикрепляйте результат к комментарию.
Исполнитель Робот. Циклы.
Итак, что такое цикл? Представьте, что мы находимся на уроке физической культуры и перед нами стоит задача сделать 7 приседаний. Это задание можно оформить в виде линейного алгоритма и тогда оно будет выглядеть примерно так:
сделай приседание
сделай приседание
сделай приседание
сделай приседание
сделай приседание
сделай приседание
сделай приседание
Т. е мы повторили команду сделай приседание 7 раз. А есть ли смысл писать 7 одинаковых команд? Может проще дать команду сделай 7 приседаний? Конечно проще и правильнее. Это и есть цикл. Вы можете сами вспомнить примеры циклов из жизни — их довольно много.
Это и есть цикл. Вы можете сами вспомнить примеры циклов из жизни — их довольно много.
Таким образом линейный алгоритм, где повторяются одни и те же команды мы можем оформить в виде циклического алгоритма — примерно так:
повторяй 7 раз
сделай приседание
конец цикла
Вот так, на придуманном нами языке мы оформили цикл. У исполнителя Робот тоже есть возможность записывать циклы. Причем, циклы бывают разные. Тот вариант, который мы только что рассмотрели называется цикл со счетчиком или цикл с параметром.
Виды циклов.Цикл со счетчиком.Цикл со счетчиком применяется когда заранее известно сколько повторений необходимо сделать. В примере выше с приседаниями именно такой случай.
Для того, чтобы написать цикл со счетчиком для исполнителя необходимо знать его синтаксис. А он такой:
нц <количество повторений> раз
<команда 1>
<команда 2>
…
<команда n>
кц
Здесь мы должны указать количество повторений (число) и команды, которые будут повторяться. Команды, которые повторяются в цикле называют телом цикла.
Команды, которые повторяются в цикле называют телом цикла.
Давайте рассмотрим это на примере.
Закрасим 7 клеток, как на рисунке. Рекомендую почитать про стартовую обстановку Робота и про его простые команды.
Изначально Робот находился в левой верхней клетке.
Давайте для начала решим задачу линейно. В этом случае мы будет закрашивать текущую клетку и перемещаться на 1 клетку вправо и программа будет выглядеть так:
использовать Робот
алг
нач
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
закрасить
вправо
кон
Как видим, команды закрасить и вправо повторяются 7 раз. Давайте теперь перепишем программу с использованием цикла. Кстати, чтобы вставить цикл в свою программу можно в меню Вставка выбрать пункт нц-раз-кц или нажать одну из комбинаций клавиш Esc, Р (русская буква Р) или Esc, H (латинская буква H). Причем клавиши надо нажимать последовательно — сначала Esc, отпустить ее и только потом Р или H.
Давайте теперь перепишем программу с использованием цикла. Кстати, чтобы вставить цикл в свою программу можно в меню Вставка выбрать пункт нц-раз-кц или нажать одну из комбинаций клавиш Esc, Р (русская буква Р) или Esc, H (латинская буква H). Причем клавиши надо нажимать последовательно — сначала Esc, отпустить ее и только потом Р или H.
Так вот, наша программа с циклом будет выглядеть так:
использовать Робот
алг
нач
нц 7 раз
закрасить
вправо
кц
кон
Если мы ее запустим, то увидим, что в результате получится тоже самое — 7 закрашенных клеток. Однако программа стала короче и значительно грамотней с алгоритмической точки зрения!
В качестве разминки и закрепления предлагаю самостоятельно написать программу для Робота, которая нарисует квадрат со стороной 7 клеток. Естественно, используя цикл. Жду решения в комментариях.
Естественно, используя цикл. Жду решения в комментариях.
Вернемся к физкультуре и изменим задачу. Ведь кто-то может и не сделать 7 приседаний, а другой способен сделать 27. Можно ли учесть это при создании цикла? Конечно. Только теперь мы будем использовать не счетчик (количество повторений), а условие. К примеру, пока не устал, делай приседания. В этом случае человек будет делать не конкретное число приседаний, а приседать до тех пор, пока не устанет. И наш цикл на абстрактном языке примет такой вид:
пока не устал
сделай приседание
конец цикла
Слова не устал в нашем случае — это условие. Когда оно истинно, цикл выполняется. Если же оно ложно (устал) тело цикла не будет выполнено. У исполнителя Робот есть несколько условий
сверху свободно
снизу свободно
слева свободно
справа свободно
сверху стена
снизу стена
слева стена
справа стена
Теперь давайте решим следующую задачу для Робота — нарисовать вертикальную линию от левой до правой границы поля использую цикл с условием. Изначально Робот находится в левом верхнем углу.
Изначально Робот находится в левом верхнем углу.
Давайте сначала сформулируем словесный алгоритм — т. е. опишем словами что нужно делать Роботу. Этот алгоритм будет звучать примерно так:
«Пока справа свободно делай шаг вправо и закрашивай клетку»
В результате Робот пробежит по всем клеткам вправо и будет их закрашивать до тех пор, пока справа не окажется стена.
Исходный код нашей программы для Робота будет примерно такой:
использовать Робот
алг
нач
нц пока справа свободно
вправо
закрасить
кц
кон
В результате выполнения этой программы мы увидим вот такую картину:
Как видим, не хватает только закрашенной первой клетки. Для этого перед циклом необходимо выполнить команду закрасить.
Для закрепления прошу написать программу, которая будет делать рамку вокруг рабочего поля Робота независимо от его размера. Конечно же с использованием циклов с условием. В итоге должно получиться так:
Конечно же с использованием циклов с условием. В итоге должно получиться так:
Урок 14.Робот. Команды для Робота. Программа для РоботаПлан урока
Решение компьютерных задачЗадача 336. Задача аналогичная компьютерной задаче 333 (см. комментарии к задаче 333). Задача 337. Это компьютерная задача нового типа –
задача на составление программы для Робота. Поскольку это первая такая
задача, она очень простая – на программу не накладывается никаких
условий. Например, ребенок может написать программу из одной или двух
команд. В этой задаче ребята смогут увидеть еще одно применение нашего
электронного инструмента, который запускает Робота. С помощью этого
инструмента очень удобно осуществлять проверку, например, проверку
правильности написания программы для Робота. Для этого достаточно
заставить Робота выполнить написанную программу. Задача 338. Задача на повторение понятий
«раньше/позже» для бусин цепочки. Задача 339. Эта задача того же типа, что и задача
337, но несколько сложнее, ведь здесь нужно составить программу
определенной длины. Конечно, таких программ очень много и вряд ли
кто-то из ребят ошибется в этой задаче. Тем не менее, проследите, что
все выполнили проверку, заставив Робота выполнить свою программу. Задача 340. Задача на построение цепочки по
описанию, включающему разнообразную цепочечную лексику. В данном случае
подходят ровно две цепочки, которые схожи, с точностью до перестановки
двух котов. Действительно, ставим второй и последней фигуркой разных
котов. Перед рыбкой должен быть кот, причем явно не последний, а второй
кот. Решение обязательных бумажных задачЗадача 39. Ответ: см. рисунок. Три
цвета помечены белым, серым и черным. Каким цветам они соответствуют,
будет зависеть от того, как именно будут расположены бусины мешка К на
первом уровне. Задача 40. Еще одна задача на выполнение программы
для Робота. Здесь вам помогут все советы, которые мы давали в задача
36, 37, 38. У этой задачи имеются и свои отличия. В компьютерных
задачах ребята уже видели не прямоугольное (вырезанное) поле. В
бумажных задачах эта деталь встречается впервые. Вы, конечно,
понимаете, что на таком поле Роботу двигаться сложнее, поэтому в
задачах на составление программы эта особенность используется
содержательно. Задача 44. Это первое задание, где, имея позицию
Робота после выполнения программы, требуется заполнить пропуски в самой
программе. Основная идея, работающая при решении подобных задач, проста
– мы не можем писать такие команды, чтобы Робот попадал в незакрашенные
после выполнения программы клетки. Решение необязательных бумажных задачЗадача 45. Задача на повторение алгоритма подсчета
областей картинки. Видим, что буква Р закрашена черным цветом. На листе
определений в первом классе мы договорились не считать черный цвет как
отдельную область (например, границу или какие-то другие линии).
Поэтому мы не считаем букву Р отдельной областью. Задача 47. Предоставьте ребятам самостоятельно
найти для себя подсказку: латинский алфавит есть в учебнике в двух
местах: на второй странице обложки и в задаче 17. Формирование умения
ориентировки и поиска необходимой информации – одна из основных задач
курса, даже если эти операции ребята пока учатся выполнять в пределах
одной части учебника. |
||
Урок 15.Робот. Команды для Робота. Программа для РоботаПлан урока
Решение компьютерных задачЗадача 341. Аналогичную бумажную задачу ребята уже
решали (см. комментарии к задаче 44). Задача 342. Задачи на написание программы для
Робота дети уже решали. Здесь в качестве дополнительного условия
учащимся нужно привести Робота из одной клетки поля в другую. Конечно,
подходящих программ имеется много. Даже длина таких программ может быть
разной. Самые короткие программы, при выполнении которых Робот не
возвращается в уже закрашенные клетки, будут длины 6. Но, с
возвращениями программы могут быть и гораздо длиннее. В данном случае
ребенок не должен выйти за пределы числа строк в программе. Если у
кого-то программа не уместилась в окнах, поговорите с таким ребенком о
том, нельзя ли сделать эту программу короче. Задача 343. Задача на построение цепочки по
описанию. Решений здесь довольно много. Из условия нетрудно понять, что
цепочка состоит из восьми круглых бусин разного цвета. После этого
можно сразу поставить в цепочку оранжевую, красную и синюю бусины так,
чтобы были истинны первое и третье утверждения. Задача 344. Задача на повторение листов определений
«Длина цепочки», «Цепочка цепочек». Аналогичные задачи дети решали уже
не раз, поэтому с этой задачей все ребята должны справиться
самостоятельно. Задача 345. Необязательная. Хотя эта задача на
построение дерева по описанию, нетрудно понять, что она в большей
степени математическая. Действительно, наиболее сложным шагом в этой
задаче является определение того, сколько монет каждого достоинства
должно быть в дереве. Само построение дерева после этого не будет
представлять никаких проблем. Определить число монет каждого
достоинства можно при помощи полного перебора. Ясно, что в любом дереве
должна быть хотя бы одна корневая бусина и хотя бы два листа. Поэтому
перебор можно вести по пятирублевым или по двухрублевым монетам. Мы
выбираем пятирублевые монеты, поскольку перебор в этом случае будет
меньше. Задача 42. В начальной позиции на поле уже
закрашены несколько клеток. Задача 46. Вполне возможно, что большинство ваших
ребят к настоящему моменту решают подобные задачи легко и уверенно. В
этом случае предложите задачу выборочно, лишь тем, кто еще путается в
таких задачах. Задача 48. Эта задача сложнее предыдущих задач о
Роботе. Робот мог начать выполнять программу из любой закрашенной
клетки поля, включая ту, на которой он закончил свой путь. Поэтому если
решать задачу «в лоб», то придется проверять каждую программу из всех
стартовых позиций. Можно выполнить все программы на листе бумаги в клетку (на
«бесконечном» поле). Главное при этом – не забыть отметить положение
Робота в конце выполнения программы (например, при выполнении четвертой
программы Робот закрашивает тот же узор, но в результате оказывается в
другой клетке). В таком случае мы сразу поймем, какая программа
подходит, ведь при ее выполнении Робот закрасит тот же узор и
остановится в том же месте, как на позиции после выполнения программы С. После того как правильная программа (вторая слева в нижнем ряду)
вырезана и наклеена, надо не забыть отметить положение Робота в
начальной позиции (вторая слева клетка предпоследнего ряда поля). Задача 50. С подобным заданием мы уже встречались в
задаче 44. Будем использовать те же рассуждения. Выполним первые три
команды. Дальше команда пропущена, но мы видим, что, оставаясь в
пределах заштрихованных после выполнения программы клеток, Робот может
выполнить только одну команду – «вниз», ее и вписываем в окно.
Выполняем следующие три данные команды. Ситуация стала немного иной –
из этой клетки Робот может, оставаясь в пределах узора, выполнить
команду как «вверх», так и «вниз». Но если Робот выполнит сейчас
команду «вверх», то не сможет затем выполнить следующую – «вправо»,
значит, подходит только команда «вниз». Задача 49. Вспомним, как часто не только дети, но и
взрослые не могут понятно объяснить дорогу из одного места в другое.
Необходимый компонент такого умения – указание ясных, четких и
однозначных ориентиров, которые понятны всем. Мы предлагаем один из
способов указания ориентиров – лексику из темы «Цепочки». Это
совершенно естественно, если речь идет о домах, стоящих на одной
стороне улицы, – они действительно образуют цепочку, если мы указали
направление движения. Задача 51. Задача на повторение лексики, связанной
с деревьями, а также на работу с утверждениями, не имеющими смысла в
какой-то ситуации. На листах определений на с. 4–5 эта тема обсуждается
и приводятся примеры утверждений, не имеющих смысла для данных
деревьев. Напомните об этом тем детям, которые примутся за решение
задачи. |
 Форма поля может быть самой
разнообразной. Важно только, чтобы ее можно было разделить на
квадратики, то есть полем Робота может быть любая фигура, вырезанная из
листа клетчатой бумаги по границам клеток.
Форма поля может быть самой
разнообразной. Важно только, чтобы ее можно было разделить на
квадратики, то есть полем Робота может быть любая фигура, вырезанная из
листа клетчатой бумаги по границам клеток.  п. Но
пока Робот этого делать не умеет.
п. Но
пока Робот этого делать не умеет.

 В компьютерной задаче все гораздо проще – можно просто
запустить Робота из каждой клетки поля и посмотреть, что получится. Это
не займет много времени и не отнимет много сил. Конечно, после каждого
нового «запуска» Робота поле необходимо очищать. Клетки поля лучше
перебирать не как попало, а по некоторой системе (чтобы не запускать
Робота дважды из одной клетки и не пропускать клетки). Например, можно
перебирать клетки слева направо и сверху вниз. Как только ребенку
встретилась клетка, из которой можно выполнить данную программу, он
останавливает перебор и закрашивает такую клетку в ответе. Данную
программу, оказывается, Робот может выполнить и не сломаться только из
нижнего правого угла поля.
В компьютерной задаче все гораздо проще – можно просто
запустить Робота из каждой клетки поля и посмотреть, что получится. Это
не займет много времени и не отнимет много сил. Конечно, после каждого
нового «запуска» Робота поле необходимо очищать. Клетки поля лучше
перебирать не как попало, а по некоторой системе (чтобы не запускать
Робота дважды из одной клетки и не пропускать клетки). Например, можно
перебирать клетки слева направо и сверху вниз. Как только ребенку
встретилась клетка, из которой можно выполнить данную программу, он
останавливает перебор и закрашивает такую клетку в ответе. Данную
программу, оказывается, Робот может выполнить и не сломаться только из
нижнего правого угла поля. На первый взгляд может
показаться, что эти слова стоят в алфавитном порядке, но в некоторых
местах этот порядок все же нарушается, поэтому последнее утверждение
будет ложным.
На первый взгляд может
показаться, что эти слова стоят в алфавитном порядке, но в некоторых
местах этот порядок все же нарушается, поэтому последнее утверждение
будет ложным.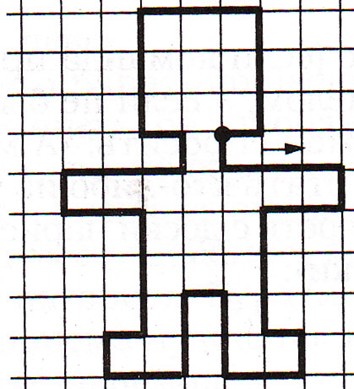 Жирную точку пока не ставим, так как положение Робота
собираемся менять. В начальной позиции закрашена только одна клетка,
но, как следует из листа определения, возможна и более сложная
предварительная раскраска. Переходим к работе с программой. Ее
необходимо выполнять шаг за шагом по следующей схеме: читаем команду,
перемещаемся на одну клетку в заданном направлении, закрашиваем клетку,
в которую попал Робот. В клетке, в которой Робот оказывается после
выполнения последней команды, ставим жирную точку. При такой работе
ошибки практически исключаются. Остается одна проблема – если ученик
отвлечется в процессе выполнения программы, то ему придется начать
работу заново, так как он потеряет последнюю выполненную команду. Чтобы
исключить такую возможность, посоветуйте помечать в программе каждую
команду после ее выполнения.
Жирную точку пока не ставим, так как положение Робота
собираемся менять. В начальной позиции закрашена только одна клетка,
но, как следует из листа определения, возможна и более сложная
предварительная раскраска. Переходим к работе с программой. Ее
необходимо выполнять шаг за шагом по следующей схеме: читаем команду,
перемещаемся на одну клетку в заданном направлении, закрашиваем клетку,
в которую попал Робот. В клетке, в которой Робот оказывается после
выполнения последней команды, ставим жирную точку. При такой работе
ошибки практически исключаются. Остается одна проблема – если ученик
отвлечется в процессе выполнения программы, то ему придется начать
работу заново, так как он потеряет последнюю выполненную команду. Чтобы
исключить такую возможность, посоветуйте помечать в программе каждую
команду после ее выполнения. Выше мы упоминали о том, что
возможно «соскальзывание» с программы, т. е. утеря учащимся последней
выполняемой команды, и обсуждали, как этого избежать. Возможно и другое
– соскальзывание с текущего положения Робота, т. е. утеря той клетки,
где он находится после выполнения той или иной команды. В таких
задачах, как 36 и 37, где Робот не проходит дважды по одним клеткам и
программа достаточно проста, такого обычно не происходит. Однако, если
Робот движется с возвращениями, как в данной и во многих последующих
задачах, это вполне вероятно. Нам необходимо иметь рецепт и на этот
случай. Идея очевидна – отмечать текущее положение Робота, но вот как
воплотить ее в жизнь? Если на том же поле, на котором заштриховываем
клетки, еще помечать текущее положение, то может возникнуть неразбериха
и грязь, ведь после каждого шага предыдущее текущее положение придется
стирать. Лучше делать это на другом поле, например на запасном поле с
листа вырезания.
Выше мы упоминали о том, что
возможно «соскальзывание» с программы, т. е. утеря учащимся последней
выполняемой команды, и обсуждали, как этого избежать. Возможно и другое
– соскальзывание с текущего положения Робота, т. е. утеря той клетки,
где он находится после выполнения той или иной команды. В таких
задачах, как 36 и 37, где Робот не проходит дважды по одним клеткам и
программа достаточно проста, такого обычно не происходит. Однако, если
Робот движется с возвращениями, как в данной и во многих последующих
задачах, это вполне вероятно. Нам необходимо иметь рецепт и на этот
случай. Идея очевидна – отмечать текущее положение Робота, но вот как
воплотить ее в жизнь? Если на том же поле, на котором заштриховываем
клетки, еще помечать текущее положение, то может возникнуть неразбериха
и грязь, ведь после каждого шага предыдущее текущее положение придется
стирать. Лучше делать это на другом поле, например на запасном поле с
листа вырезания. Чтобы этого не случилось,
посоветуйте ребятам выработать определенную систему раскрашивания.
Например, можно раскрашивать фрукты по строчкам (или по столбцам)
таблицы. Полезно сразу помечать ту клетку в таблице, которую уже
использовали. Берем первую клетку первой строки таблицы, в ней стоит
число 2, значит, в мешке должны быть две красные вишни. Раскрашиваем
две любые вишни в мешке красным и ставим в клетке галочку, означающую,
что эту информацию уже использовали. Так можно продолжать работать до
тех пор, пока все клетки в таблице не будут помечены.
Чтобы этого не случилось,
посоветуйте ребятам выработать определенную систему раскрашивания.
Например, можно раскрашивать фрукты по строчкам (или по столбцам)
таблицы. Полезно сразу помечать ту клетку в таблице, которую уже
использовали. Берем первую клетку первой строки таблицы, в ней стоит
число 2, значит, в мешке должны быть две красные вишни. Раскрашиваем
две любые вишни в мешке красным и ставим в клетке галочку, означающую,
что эту информацию уже использовали. Так можно продолжать работать до
тех пор, пока все клетки в таблице не будут помечены. 
 Здесь неявно всплывает проблема
бессмысленности утверждений, поскольку среди данных слов есть и такие,
для которых одно из данных утверждений не имеет смысла. В результате мы
находим всего три слова, для которых данное утверждение истинно.
Здесь неявно всплывает проблема
бессмысленности утверждений, поскольку среди данных слов есть и такие,
для которых одно из данных утверждений не имеет смысла. В результате мы
находим всего три слова, для которых данное утверждение истинно. Значит рыбку ставим третьей. Поскольку в нашей цепочке всего 5
фигурок и все фигурки разные, то на оставшихся местах ставим бабочку и
белку, причем белка должна идти раньше.
Значит рыбку ставим третьей. Поскольку в нашей цепочке всего 5
фигурок и все фигурки разные, то на оставшихся местах ставим бабочку и
белку, причем белка должна идти раньше. Здесь же она особой роли не играет, пока мы хотим лишь
приучить ребят к тому, что такое бывает.
Здесь же она особой роли не играет, пока мы хотим лишь
приучить ребят к тому, что такое бывает.
 Отличие данной задачи лишь в том,
что электронный инструмент позволяет детям сделать проверку решения
легко и быстро.
Отличие данной задачи лишь в том,
что электронный инструмент позволяет детям сделать проверку решения
легко и быстро.  Поэтому
выбираем команду «вниз». Дальше решение достраивается быстро.
Поэтому
выбираем команду «вниз». Дальше решение достраивается быстро. Затем оставшиеся бусины
можно поставить в цепочку на любые места.
Затем оставшиеся бусины
можно поставить в цепочку на любые места. Итак, пусть в дереве 2 пятирублевых монеты. Видим, что сумму в
43 рубля 10 монетами никак не наберешь. Даже если использовать монеты
наибольшего достоинства (по 2 рубля), то их понадобиться не меньше 16.
Значит надо брать пятирублевых монет больше. Можно добавлять монеты по
одной, а можно сразу по несколько и смотреть что получится. В
результате получаем, что в нашем дереве 8 пятирублевых монет, 1
двухрублевая и 1 рублевая. Подходящих деревьев в этой задаче
оказывается довольно много. У всех таких деревьев одна корневая бусина
(монета в 2 рубля) и пятирублевые листья (которых может быть от двух до
восьми). Монета в 1 рубль не будет листом. Теоретически число уровней в
этой задаче может быть от трех до девяти. Однако у детей не получится в
этой задаче (как и в большинстве компьютерных задач) сделать больше
четырех уровней.
Итак, пусть в дереве 2 пятирублевых монеты. Видим, что сумму в
43 рубля 10 монетами никак не наберешь. Даже если использовать монеты
наибольшего достоинства (по 2 рубля), то их понадобиться не меньше 16.
Значит надо брать пятирублевых монет больше. Можно добавлять монеты по
одной, а можно сразу по несколько и смотреть что получится. В
результате получаем, что в нашем дереве 8 пятирублевых монет, 1
двухрублевая и 1 рублевая. Подходящих деревьев в этой задаче
оказывается довольно много. У всех таких деревьев одна корневая бусина
(монета в 2 рубля) и пятирублевые листья (которых может быть от двух до
восьми). Монета в 1 рубль не будет листом. Теоретически число уровней в
этой задаче может быть от трех до девяти. Однако у детей не получится в
этой задаче (как и в большинстве компьютерных задач) сделать больше
четырех уровней.  Содержательного усложнения это пока не
дает, ребята должны лишь привыкнуть к тому, что такое бывает, и
помнить, что, проходя по закрашенной клетке, Робот не меняет ее цвета.
Здесь особую актуальность приобретает подготовительный этап –
аккуратное перенесение раскраски клеток начальной позиции на поле, где
мы будем выполнять программу.
Содержательного усложнения это пока не
дает, ребята должны лишь привыкнуть к тому, что такое бывает, и
помнить, что, проходя по закрашенной клетке, Робот не меняет ее цвета.
Здесь особую актуальность приобретает подготовительный этап –
аккуратное перенесение раскраски клеток начальной позиции на поле, где
мы будем выполнять программу.  Для этого нужно будет перебрать 45 вариантов (9
программ на 5 возможных начальных позиций). Подумаем, как можно
избежать такого громоздкого перебора.
Для этого нужно будет перебрать 45 вариантов (9
программ на 5 возможных начальных позиций). Подумаем, как можно
избежать такого громоздкого перебора.  Таким
образом, последняя команда программы должна быть «вправо»: вычеркиваем
все программы, для которых это не верно. Остаются три подходящие
программы, что существенно уменьшает перебор.
Таким
образом, последняя команда программы должна быть «вправо»: вычеркиваем
все программы, для которых это не верно. Остаются три подходящие
программы, что существенно уменьшает перебор.  Продолжаем выполнять известные
команды программы, и остается последнее пустое окно. Его мы заполняем,
исходя из положения Робота после выполнения программы, – это снова
команда «вниз».
Продолжаем выполнять известные
команды программы, и остается последнее пустое окно. Его мы заполняем,
исходя из положения Робота после выполнения программы, – это снова
команда «вниз».
 Кроме того, есть предыдущая
бусина перед Т, причем, естественно, тоже одна. Эта бусина – буква О,
поэтому для дерева N третье утверждение истинно. Аналогичные
рассуждения подойдут и для четвертого утверждения.
Кроме того, есть предыдущая
бусина перед Т, причем, естественно, тоже одна. Эта бусина – буква О,
поэтому для дерева N третье утверждение истинно. Аналогичные
рассуждения подойдут и для четвертого утверждения.Робот для раскрашивания пасхальных яиц :: Это интересно!
Каждую Пасху мы стараемся попробовать какой-нибудь новый способ раскрашивания яиц. Использовать оригинальные техники рисования, интересные материалы или что-то подобное. В этот раз мы опробовали совсем уж необычный способ рисования на яйцах — с помощью робота!
Каких только роботов для того, чтобы позабавить детей, не собирал мой муж. Но такого у нас еще не было! Это настоящий станок с числовым программным управлением 🙂 И сделан он был в рекордно короткие сроки — всего двое суток понадобилось на то, чтобы полностью «с нуля» собрать и настроить устройство из совершенно бросовых материалов. Да еще и написать программу для компьютера, который будет управлять этим устройством. И теперь у нас дома есть робот, который может нарисовать на яйце запрограммированный рисунок.
Да еще и написать программу для компьютера, который будет управлять этим устройством. И теперь у нас дома есть робот, который может нарисовать на яйце запрограммированный рисунок.
Ниже я даже видео выложила, как происходит сам процесс рисования. И, конечно, фото устройства и самих яиц, разрисованных роботом.
Вот на этом видео (оно ускорено, и длится всего пару минут) можно понаблюдать за процессом работы нашего робота.
Подобные штуки называют «eggbot» и их, в общем-то, можно даже купить через интернет. Только вот стоят они достаточно дорого, чтобы выбрасывать деньги на эту игрушку. А иметь ее дома хочется. Хорошо, что у нашего папы достаточно знаний и умений, чтобы поискать схемы в сети и сделать робота своими руками:)
Все технические подробности я опускаю. Это лучше спрашивать у Антона — что и как устроено. Я лишь только кратко объясню, что тут происходит.
Я лишь только кратко объясню, что тут происходит.
Один моторчик крутит яйцо, другой — поворачивает кулису с фломастером, а электромагнит поднимает и опускает фломастер.
Весь крепеж для них сделан из ПВХ. Антон после того, как сделал из него нашу кормушку, очень полюбил этот материал — работать с ним так же легко как с деревом, а выглядит готовое изделие гораздо привлекательнее.
| Общий вид устройства для раскрашивания яиц |
Все движения управляются крохотным компьютером, размером с кредитку, который называется Raspberry Pi. Несмотря на свой малый размер, это полноценный компьютер! На нем стоит Linux, в него можно втыкать флэшки, общаться с ним через Wi-Fi, а еще его можно программировать как угодно и, главное — к нему можно подключать самодельные устройства.
 Вообще-то он был куплен, чтобы можно было смотреть с помощью него фильмы с компьютера на телевизоре, но потенциал Распика, как его любовно называют в сообществе любителей этого компьютера, оказался гораздо большим. Антон уже делал на нем управление фотоаппаратом для съемки того, как растет росток, именно на нем работала вебкамера, транслирующая события из нашей кормушки. А теперь он пригодился нам, чтобы покрасить яйца на Пасху.
Вообще-то он был куплен, чтобы можно было смотреть с помощью него фильмы с компьютера на телевизоре, но потенциал Распика, как его любовно называют в сообществе любителей этого компьютера, оказался гораздо большим. Антон уже делал на нем управление фотоаппаратом для съемки того, как растет росток, именно на нем работала вебкамера, транслирующая события из нашей кормушки. А теперь он пригодился нам, чтобы покрасить яйца на Пасху.
| Распберри пай — крохотный компьютер |
| Робот за работой |
Но это только сложно объяснять, как устроен робот. В управлении он проще некуда! Включаешь, вставляешь в зажим фломастер нужного цвета, а в держатель — яйцо, которое нужно разрисовать, и все готово!
| Как робот рисует на яйце |
Можно запускать предварительно написанную программу, управляющую движением фломастера — и робот начнет рисовать сам.

А можно программу не писать, а управлять роботом вручную с клавиатуры. Ничего сложного: стрелочки «назад» — «вперед», «влево» — «вправо» и специально запрограммированные Антоном кнопки, выполняющие более сложные действия. Например, полный поворот яйца, отрисовку элемента «греческого» орнамента и некоторые другие.
Катя предпочитает рисовать на яйцах именно этим способом 🙂
А Витя, вообще, подошел к делу серьезно и сначала нарисовал эскиз, как должен выглядеть его рисунок. На фото виден блокнот, в котором по клеточкам он разрисовал своего Флеша (персонажа любимого комикса ). А потом перенес рисунок на яйцо с помощью робота.
А нам с Антоном больше по душе, когда робот рисует по программе сам. И лучше всего у него получаются разные рисунки из полосок и клеточек. Например, шотландские клетки в его исполнении просто великолепны! На фото можно увидеть их примеры.
| Узоры на яйцах |
| Яйца, раскрашенные роботом |
| Яйца, раскрашенные роботом |
Предупреждая сразу вопрос о том, не вредно ли есть яйца, покрашенные фломастером, я отвечу так: я считаю, что не вредно.
 Во-первых, фломастеры у нас на водяной основе — те, которые разрешены маленьким детям. Во-вторых, яйца мы красим незадолго до того, как их будем есть — мы их подолгу не храним и краска не успевает проступить сквозь скорлупу. А в-третьих, таким образом можно красить и пустые скорлупки, надо только предварительно выдуть из них содержимое — получится декоративный сувенир.
Во-первых, фломастеры у нас на водяной основе — те, которые разрешены маленьким детям. Во-вторых, яйца мы красим незадолго до того, как их будем есть — мы их подолгу не храним и краска не успевает проступить сквозь скорлупу. А в-третьих, таким образом можно красить и пустые скорлупки, надо только предварительно выдуть из них содержимое — получится декоративный сувенир.Еще разные устройства и штуки, которые делал Антон, можно посмотреть тут: Микроскоп из мобилки, Макет космического аппарата «OSIRIS-REx», Проволочные головоломки, Наушники без проводов, Шум морского прибоя в ванной, Автоукачивалка на детскую кроватку, Люстра ручной работы в кухню, Робот из ненужных деталек и Робот-компьютерная мышка, Робот-паук, Модель электрического мотора, Радистский (телеграфный) ключ, Водяная ракета, Паровая турбина, Светофор, Перископ.
Задание с роботом по информатике как делать. Исполнитель Робот. Простые команды
Ее для дальнейшей работы и научились задавать . Теперь перейдем непосредственно к составлению алгоритмов для Робота с использованием простых команд.
Теперь перейдем непосредственно к составлению алгоритмов для Робота с использованием простых команд.
Если вам больше нравится информация в формате видеоуроков, то на сайте есть видеоурок
У любого исполнителя должна быть система команд (СКИ — система команд исполнителя ). Система команд исполнителя — совокупность всех команд, которые может выполнить исполнитель. В качестве примера рассмотрим дрессированную собаку. Она умеет выполнять некоторые команды — «Сидеть», «Лежать», «Рядом» и т. п. Это и есть ее система команд.
Простые команды Робота
У нашего Робота тоже есть система команд. Сегодня мы рассмотрим простые команды Робота . Всего их 5:
- вверх
- влево
- вправо
- закрасить
Результат выполнения этих команд понятен из их названия:
- вверх — переместить Робота на одну клетку вверх
- вниз — переместить Робота на одну клетку вниз
- влево — переместить Робота на одну клетку влево
- вправо — переместить Робота на одну клетку вправо
- закрасить
— закрасить текущую клетку (клетку в которой находится Робот).
Эти команды можно писать с клавиатуры, а можно использовать горячие клавиши (нажав их команды будут вставляться автоматически):
- вверх — Escape, Up (стрелка вверх)
- вниз — Escape, Down (стрелка вниз)
- влево — Escape, Left (стрелка влево)
- вправо — Escape, Right (стрелка вправо)
- закрасить — Escape, Space (пробел)
Обратите внимание, что набирать нужную комбинацию горячих клавиш нужно не привычным нам способом! Мы привыкли нажимать клавиши одновременно, а здесь их нужно нажимать последовательно . К примеру, чтобы ввести команду вверх, нужно нажать Escape, отпустить ее и после этого нажать стрелку вверх. Это нужно помнить.
Теперь мы готовы написать первый алгоритм для Робота. Предлагаю начать с простого — нарисуем квадрат со стороной 3 клетки. Поехали!
Запускаем Кумир, его. Можно начинать писать программу? Конечно нет! Мы же не ! Делаем это. Предлагаю использовать вот такую:
Вот теперь все готово. Начинаем писать программу. Пока она выглядит так
Начинаем писать программу. Пока она выглядит так
Удаляем символ «|» и называем наш алгоритм «Квадрат»
Предлагаю рисовать квадрат, двигаясь по часовой стрелке. Для начала закрасим текущую клетку, дав команду закрасить . Потом делаем шаг вправо и опять закрашиваем клетку. И еще раз шаг вправо и закрасить.
Попробуем запустить программу и посмотреть что же получилось. Для запуска нажимаем F9 или же кнопку на панели инструментов
В результате мы должны увидеть вот такую картину
Если такое окно Робота у вас не появилось, то на панели инструментов щелкните «Показать окно Робота » или в меню Робот выберите пункт «Показать окно Робота «. Продолжаем дальше.
Теперь мы будем двигаться вниз и закрашивать правую сторону квадрата:
вниз
закрасить
вниз
закрасить
Потом пойдем влево, закрашивая нижнюю границу квадрата
влево
закрасить
влево
закрасить
У нас осталась одна незакрашенная клетка. Закрасим ее
Закрасим ее
вверх
закрасить
Все готово! В итоге наша программа выглядит так:
использовать Робот
алг Квадрат
нач
закрасить
вправо
закрасить
вправо
закрасить
вниз
закрасить
вниз
закрасить
У исполнителя Робот есть система команд. Рассмотрим простые команды Робота . Всего их 5:
вверх — переместить Робота на одну клетку вверх
вниз — переместить Робота на одну клетку вниз
влево — переместить Робота на одну клетку влево
вправо — переместить Робота на одну клетку вправо
закрасить
Задание 1. Нарисовать квадрат со стороной 3 клетки.
Запускаем Кумир
Удаляем символ «|» и называем наш алгоритм «Квадрат» (рядом со служебным словом алг пишем Квадрат )
закрасить
закрасить
закрасить
Запустить программу и посмотреть что получилось. Для запуска нажимаем F9
или же кнопку на панели инструментов Выполнить программу
Для запуска нажимаем F9
или же кнопку на панели инструментов Выполнить программу
Если такое окно Робота у вас не появилось, то на панели инструментов щелкните «Показать окно Робота » или в меню Робот выберите пункт «Показать окно Робота «. Продолжаем дальше:
вниз
закрасить
вниз
закрасить
Потом пойдем влево, закрашивая нижнюю границу квадрата
влево
закрасить
влево
закрасить
У нас осталась одна незакрашенная клетка. Закрасим ее
вверх
закрасить
Все готово! В итоге наша программа выглядит так:
использовать Робот
алг Квадрат
закрасить
закрасить
закрасить
закрасить
закрасить
закрасить
закрасить
закрасить
Задание 2
.Используя простые команды Робота,
написать программу, рисующую букву П, Р, Ш, Щ, Т,Н.![]()
Цикл с условием.
У исполнителя Робот есть несколько условий: сверху свободно снизу свободно слева свободно справа свободно сверху стена снизу стена
слева стена справа стена
Задание 3 .
Нарисовать вертикальную линию от левой до правой границы поля использую цикл с условием. Изначально Робот находится в левом верхнем углу.
Исходный код нашей программы для Робота будет примерно такой:
использовать Робот
алг
нач
закрасить
нц пока справа свободно
вправо
закрасить
кц
кон
В результате выполнения этой программы мы увидим вот такую картину:
Задание 4 .Написать программу, которая будет делать рамку вокруг рабочего поля Робота независимо от его размера. Конечно же с использованием циклов с условием. В итоге должно получиться так:
Весь процесс состоит из двух этапов: сборки и программирования. Чтобы собрать хорошего робота, нужны знания в механике. Чтобы запрограммировать робота на определённые действия, нужно знать язык, который поймёт системная плата или программный блок. Школьными знаниями по информатике тут не обойтись.
Чтобы собрать хорошего робота, нужны знания в механике. Чтобы запрограммировать робота на определённые действия, нужно знать язык, который поймёт системная плата или программный блок. Школьными знаниями по информатике тут не обойтись.
Где взять материал?
Сначала нужно решить, как вы хотите собирать робота: из готовых наборов или самостоятельно подбирать материалы. Преимущество набора в том, что вам не нужно искать детали по отдельности. Чаще всего из одного набора можно собрать несколько устройств.
Конструкция, собранная не из готового набора, называется открытой системой. У неё тоже есть свои плюсы: ваш робот будет индивидуальностью, и вы сами сможете улучшать конструкцию. Но времени и сил потратите однозначно больше.
Из чего состоит робот?
Корпус – металлическое или пластмассовое «тело»
, к которому прикрепляются остальные детали. У каждого робота есть источник энергии – батарейки или аккумулятор. В зависимости от того, какую задачу будет выполнять робот, выбирают датчики: они могут определять цвет и свет, реагировать на касание.
Чтобы заставить робота двигаться, понадобятся моторы. «Голова» всего механизма – системная плата или программный блок. С их помощью робот подключается к компьютеру и получает набор задач.
Как заставить его что‑то делать?
Чтобы робот выполнил какое‑то действие, нужно создать компьютерную программу. Сложность этого этапа зависит от сборки. Если робот собран из набора Lego Mindstorms или mBot, то с их программным обеспечением справятся даже дети.
Если вы собираете робота сами, вам нужно изучить основы программирования и язык, на котором собираетесь писать программу, например C++.
Почему робот может не выполнить программу?
Попадая в новое место, он может сбиться и выполнять программу неверно. Для того чтобы робот делал всё правильно, надо отрегулировать датчики. Например, слишком яркое освещение может помешать адекватно распознать цвета. В зависимости от поверхности, по которой передвигается робот, регулируют мощность моторов.
Можно научиться собирать и программировать в школе?
Несмотря на то что робототехника не входит в школьную программу, преподаватели по физике и информатике могут научить ребёнка собирать и программировать. В Белгороде в некоторых школах есть кружки, где делают роботов.
В Белгороде в некоторых школах есть кружки, где делают роботов.
«После уроков с учителями физики и информатики мы учимся программировать. Уже умеем работать в LegoMindstorms и Robolab (программное обеспечение для роботов – прим. авт. ). Также иногда учимся делать 3D-чертежи деталей», – рассказали ученики Белгородского инженерного юношеского лицея-интерната и участники «РобоФеста-2018» Антон Першин и Дмитрий Чернов .
Где, кроме школы, можно стать робототехником?
В инжиниринговой школе БелГУ есть класс, в котором учат собирать и программировать роботов. В 2017 году в Белгороде открылся «Кванториум» , в котором робототехнике учат школьников с девяти лет.
Чтобы стать настоящим робототехником, можно поступить на робототехнический факультет. В Белгороде пока таких нет, но в БГТУ им. Шухова есть кафедра технической кибернетики . Её студенты занимают призовые места на всероссийских соревнованиях по робототехнике.
Можно ли научиться самому?
Да. Есть множество ресурсов в Интернете, на которых можно узнать, из чего собрать и как запрограммировать робота.
Будет ли робот полезным?
Его можно приспособить под бытовые задачи и сделать помощником в доме. В Интернете есть много примеров, как домашние изобретатели создают роботов для выпечки блинов или уборки квартиры.
Как подтвердить свои успехи в создании роботов?
Принять участие в таких соревнованиях, как «РобоФест». На них в зависимости от возраста и направления существуют разные номинации. В основном у каждого вида робота есть трасса, на которой он выполняет задания: захватить кубик или прочертить линию. Есть и статичные системы, в которых судьи оценивают презентацию проекта и работу механизмов.
Как правило, участники приезжают на соревнования с собранными роботами и при подготовке тратят время только на калибровку датчиков и корректировку программы.
Редакция благодарит за помощь в создании материала участников «РобоФеста-2018» Дмитрия Агафонова
, Дмитрия Чернова
, Антона Першина
и Данила Мигрина
.
Наталья Малыхина
Управление исполнителем Робот в системе КУМИРРобот существует в определенной обстановке (прямоугольном клетчатом поле). Между некоторыми клетками поля могут быть расположены стены. Некоторые клетки могут быть закрашены (рис. 3.11).
Робот занимает ровно одну клетку поля.
По командам вверх, вниз, влево и вправо Робот перемещается в соседнюю клетку в указанном направлении. Если на пути оказывается стена, то происходит отказ — выдается сообщение о невозможности выполнить очередную команду.
По команде закрасить Робот закрашивает клетку, в которой стоит. Если клетка уже была закрашена, то она закрасится повторно, хотя никаких видимых изменений не произойдет.
Робот может исполнять только правильно записанные команды. Если вместо команды вниз написать внис, то Робот эту запись не поймет и сразу же сообщит об ошибке.
О
шибки: 1 синтаксические; 2. логические
Описания обстановок хранятся в текстовых файлах специального формата (формат. fil).
fil).
Текущая — обстановка, в которой находится Робот в данный момент (включая информацию о положении Робота).
Стартовая — обстановка, в которую принудительно помещается Робот в начале выполнения программы, использующей Робот.
Порядок работы:
Задать стартовую обстановку по условию задачи:
2. Указать Исполнителя:
Меню Вставка →Использовать Робот
3. Написать алгоритм решения задачи.
4. Выполнить алгоритм (Меню Выполнение →Выполнить непрерывно /F9)
Система команд исполнителя Робот в системе КУМИР
|
Команда |
Действие |
|
вверх |
Робот перемещается на 1 клетку вверх |
|
вниз |
Робот перемещается на 1 клетку вниз |
|
влево |
Робот перемещается на 1 клетку влево |
|
вправо |
Робот перемещается на 1 клетку вправо |
|
закрасить |
Робот закрашивает клетку, в которой находится |
|
справа свободно |
Робот проверяет выполнение соответствующего простого условия |
|
слева свободно |
↓ |
|
сверху свободно |
↓ |
|
снизу свободно |
↓ |
|
клетка закрашена |
↓ |
|
клетка чистая |
↓ |
Циклические алгоритмы
Цикл
– организация повторения действий, пока верно некоторое условие.
Тело цикла – набор повторяемых действий.
Условие –
логическое выражение (простое или сложное (составное))
Типы циклов:
1.Цикл «Повторять n раз» 2. Цикл «Пока»
нц n раз
нц пока
. . Тело цикла. . Тело цикла
кц
кц
Пример: нц пока справа свободно
Общий вид цикла «Повторять n раз:
ПОВТОРИТЬ n РАЗ
КОНЕЦ
кц
Общий вид цикла «пока»:
ПОКА ДЕЛАТЬ
КОНЕЦ
Составные условия
образуются из одного или нескольких простых условий и служебных слов И, ИЛИ, НЕ.
Составное условие А И В (где А, В — простые условия), выполнено, когда выполнено каждое из двух входящих в него простых условий.
Пусть А — сверху свободно, В — справа свободно, тогда составное условие А И В — сверху свободно И справа свободно.
Составное условие А ИЛИ В выполнено, когда выполнено хотя бы одно из двух входящих в него простых условий: сверху свободно ИЛИ справа свободно
Составное условие НЕ А — выполнено, когда не выполнено условие А.

Пример: Пусть А – клетка закрашена (простое условие).
Проверка составного условия НЕ А:
а) А — выполнено, НЕ А (НЕ закрашено) — не выполнено.
б) А — не выполнено, НЕ А (НЕ закрашено) — выполнено.
Команда ветвления
Ветвление — форма организации действий, при которой в зависимости от выполнения или невыполнения некоторого условия совершается либо одна, либо другая последовательность действий.
Общий вид команды ЕСЛИ:
ЕСЛИ ТО ИНАЧЕ
КОНЕЦ
В языке КУМИР:
Полное ветвление: Неполное ветвление:
если
то
если
то
иначе
все все
Вспомогательный алгоритм — алгоритм, решающий некоторую подзадачу основной задачи.
В системе КУМИР вспомогательные алгоритмы пишутся в конце основной программы (после служебного слова кон
), вызываются на выполнение в основой программе по имени.
Вопросы и задания
1. Приведите все алгоритмы из трех команд, которые переместят Робота из исходного положения в клетку Б.
Существует ли для этой задачи алгоритм, при выполнении которого Робот делает:
а) два шага; б) четыре шага; в) пять шагов; г) семь шагов?
Петя составил алгоритм, переводящий Робота из клетки А в клетку Б с закрашиванием каких-то клеток. Что должен сделать Коля с этим алгоритмом, чтобы получить алгоритм, переводящий Робота из Б в А и закрашивающий те же клетки?
7. Известны два вспомогательных алгоритма Робота
Нарисуйте, что получится при выполнении Роботом следующих основных алгоритмов:
|
а) нц 5 раз
узор_1 вправо; вправо; |
б) нц 7 раз
узор_2 вправо; вправо |
|
в) вправо; вправо; вправо вверх; вверх вправо; вправо; вправо вниз; вниз
|
г) вправо; вправо вправо; вправо |
8. Составьте алгоритмы, под управлением которых Робот закрасит указанные клетки:
Составьте алгоритмы, под управлением которых Робот закрасит указанные клетки:
9. Известно, что где-то правее Робота есть стена. Составьте алгоритм, под управлением которого Робот закрасит ряд клеток до стены и вернется в исходное положение.
10. Известно, что где-то правее Робота есть закрашенная клетка.
Составьте алгоритм, под управлением которого Робот закрасит ряд клеток до закрашенной клетки и вернется в исходное положение.
11. Известно, что Робот находится рядом с левым входом в горизонтальный коридор.
12. Известно, что Робот находится где-то в горизонтальном коридоре. Ни одна из клеток коридора не закрашена.
Составьте алгоритм, под управлением которого Робот закрасит все клетки этого коридора и вернется в исходное положение.
13. В ряду из десяти клеток правее Робота некоторые клетки закрашены.
Составьте алгоритм, который закрашивает клетки:
а) ниже каждой закрашенной клетки;
б) выше и ниже каждой закрашенной клетки.
14. Что можно сказать о правильности следующего фрагмента алгоритма?
нц пока клетка закрашена
ЕСЛИ справа свободно ТО
вправо; закрась
к
ц
15. Напишите программу, с помощью которой Робот сможет попасть в клетку Б во всех трех лабиринтах.
16. Напишите программу, следуя которой Робот сможет пройти по коридору от левого нижнего угла поля к правому верхнему. Коридор имеет ширину одна клетка и тянется в направлении слева-снизу вправо-вверх. Пример возможного коридора изображен на рисунке.
З
адачи ГИА
Коридор1. Робот находится где-то в вертикальном коридоре. Ни одна из клеток коридора не закрашена. Составить алгоритм, под управлением которого Робот закрасит все клетки этого коридора и вернется в исходное положение.
К
НадоДано
оридор2. Робот находится в верхней клетке узкого вертикального коридора. Ширина коридора – одна клетка, длина коридора может быть произвольной.
Напишите для Робота алгоритм, закрашивающий все клетки внутри коридора и возвращающий Робота в исходную позицию. Например, для приведенного выше рисунка Робот должен закрасить следующие клетки (см.рисунок):
На бесконечном поле имеется длинная горизонтальная стена. Длина стены неизвестна. Робот находится в одной из клеток непосредственно сверху от стены. Начальное положение Робота также неизвестно. Одно из возможных положений:
Надо
Дано
апишите алгоритм для Робота, закрашивающий все клетки, расположенные выше стены и прилегающие к ней, независимо от размеров стены и начального положения Робота. Например, для приведенного рисунка Робот должен закрасить следующие клетки:
Конечное положение Робота может быть произвольным. При выполнении алгоритма Робот не должен разрушаться.
На бесконечном поле имеется длинная вертикальная стена. Длина стены неизвестна. Робот находится в одной из клеток, расположенной непосредственно справа от стены. Начальное положение робота также неизвестно. Одно из возможных положений робота приведено на рисунке (робот обозначен буквой «Р»):Напишите для работа алгоритм, закрашивающий все прилегающие к стене клетки: слева, начиная с верхней не закрашенной и через одну; справа, начиная с нижней закрашенной и через одну. Робот должен закрасить только клетки, удовлетворяющие данному условию. Например, для приведенного выше рисунка робот должен закрасить следующие клетки (см. рисунок): Конечное расположение робота может быть произвольным. Алгоритм должен решать задачу для произвольного размера стены и любой допустимой начальной позиции робота. При исполнении алгоритма Робот не должен разрушиться.
Длина стены неизвестна. Робот находится в одной из клеток, расположенной непосредственно справа от стены. Начальное положение робота также неизвестно. Одно из возможных положений робота приведено на рисунке (робот обозначен буквой «Р»):Напишите для работа алгоритм, закрашивающий все прилегающие к стене клетки: слева, начиная с верхней не закрашенной и через одну; справа, начиная с нижней закрашенной и через одну. Робот должен закрасить только клетки, удовлетворяющие данному условию. Например, для приведенного выше рисунка робот должен закрасить следующие клетки (см. рисунок): Конечное расположение робота может быть произвольным. Алгоритм должен решать задачу для произвольного размера стены и любой допустимой начальной позиции робота. При исполнении алгоритма Робот не должен разрушиться.
Напишите для Робота алгоритм, закрашивающий все клетки, расположенные левее вертикальной стены и выше горизонтальной стены и прилегающие к ним. Робот должен закрасить только клетки, удовлетворяющие данному условию. Например, для приведённого выше рисунка Робот должен закрасить следующие клетки (см. рисунок).
Например, для приведённого выше рисунка Робот должен закрасить следующие клетки (см. рисунок).
Напишите для Робота алгоритм, закрашивающий прилегающие к стене клетки, сверху и снизу, начиная с левой и через одну. Робот должен закрасить только клетки, удовлетворяющие данному условию. Например, для приведѐнного рисунка а) Робот должен закрасить следующие клетки (см. рис. б).
Конечное положение Робота может быть произвольным. Алгоритм должен решать задачу для произвольного размера стены и любой допустимой начальной позиции Робота.
На бесконечном поле имеется длинная вертикальная стена. Длина стены неизвестна. Робот находится в одной из клеток, расположенной непосредственно слевав от стены. Начальное положение робота также неизвестно. Одно из возможных положений робота приведено на рисунке (робот обозначен буквой «Р»):
слева все;
справа, начиная с верхней незакрашенной и через одну.
B
1102_ГИА2011
На бесконечном поле имеются две горизонтальные стены. Длина стен неизвестна. Расстояние между стенами неизвестно. Робот находится над нижней стеной в клетке, расположенной у ее левого края. Напишите для Робота алгоритм, закрашивающий все клетки, расположенные выше нижней стены и ниже верхней стены и прилегающие к ним. Робот должен закрасить только клетки, удовлетворяющие данному условию. Например, для приведенного выше рисунка робот должен закрасить следующие клетки (см. рисунок):
Конечное расположение робота может быть произвольным. Алгоритм должен решать задачу для произвольного размера поля и любого допустимого расположения стен внутри прямоугольного поля. При исполнении алгоритма Робот не должен разрушиться.
В
1103_ГИА_2011
На бесконечном поле имеется горизонтальная стена. Длина стены неизвестна. От правого конца стены вниз отходит вертикальная стена также неизвестной длины.
 Робот находится над горизонтальной стеной в клетке, расположенной у ее левого края. На рисунке указан один из возможных способов расположения стен и Робота (Робот обозначен буквой «Р»).
Робот находится над горизонтальной стеной в клетке, расположенной у ее левого края. На рисунке указан один из возможных способов расположения стен и Робота (Робот обозначен буквой «Р»).
Напишите для Робота алгоритм, закрашивающий все клетки, расположенные выше горизонтальной стены и правее вертикальной стены и прилегающие к ним. Робот должен закрасить только клетки, удовлетворяющие данному условию. Например, для приведённого выше рисунка Робот должен закрасить следующие клетки (см. рисунок).
Исполнитель Робот существует в на прямоугольном поле, разбитом на клетки, между которыми могут стоять стены и умещается целиком в одной клетке. Робот может передвигаться по полю, закрашивать клетки, измерять температуру и радиацию. Робот не может проходить сквозь стены, но может проверять, есть ли рядом с ним стена.
Система команд исполнителя «Робот» включает:
- 5 команд, вызывающих действия Робота (влево, вправо, вверх, вниз, закрасить)
- 10 команд проверки условий:
- 8 команд вида [слева/справа/снизу/сверху] [стена/свободно]
- 2 команды вида клетка [закрашена/чистая]
- 2 команды измерения (температура, радиация)
Команды-действий
Команды-проверки
| Команда | Описание |
| лог слева свободно | Возвращает да, если робот может перейти влево, иначе — нет.
|
| лог справа свободно | Возвращает да, если робот может перейти вправо, иначе -нет. |
| лог сверху свободно | Возвращает да, если робот может перейти вверх, иначе — нет. |
| лог снизу свободно | Возвращает да, если робот может перейти вниз, иначе — нет. |
| лог слева стена | Возвращает да, если слева от робота находится стена, иначе- нет. |
| лог справа стена | Возвращает да, если справа от робота находится стена, иначе- нет. |
| лог сверху стена | Возвращает да, если сверху от робота находится стена, иначе- нет. |
| лог снизу стена | Возвращает да, если снизу от робота находится стена, иначе- нет. |
| лог клетка закрашена | Возвращает да, если клетка закрашена, и нет, если клетка незакрашена. |
| лог клетка чистая | Возвращает нет, если клетка закрашена, и да, если клетка
незакрашена.
|
Команды-измерения
Пусть требуется перевести из клетки слева от стены в клетку справа от
стены:
Алгоритм может выглядеть так:
использовать Робот
алг
пример 1
нач
. вниз
. вправо
. вверх
кон
Если же попытать провести Робота через стену, то возникнет отказ. Робот врежется в стену и больше не сможет выполнять команды дальше.
Напишем алгоритм прохождения роботом лабиринта из точки А в Б:
использовать Робот
алг
из А в Б
нач
. вправо
. вверх
; вверх
;
вправо
; вниз
;
вниз
; вправо
. вверх
; вверх
; вправо
;
вниз
; вниз
;
вправо
кон
Команды прохождения каждого участка можно сгруппировать в одну строку — это сокращает запись алгоритма и делает его более понятным. Для того чтобы записать команды в одну строку их нужно разделить точкой с запятой.
Рисуем цифры по клеточкам. Сложные графические диктанты по клеточкам для школьников.

Графический диктант обычно базируется на том, что на листике в клеточку нужно изобразить тот или иной рисунок, при чем очень схематично. Такое упражнение прекрасно развивает фантазию дошкольника, позволяет развивать мелкую моторику ручек ребенка, позволяет ориентироваться по сторонам, запомнить, где право-лево, верх-вниз, а также обучает ребенка тому, как можно схематично нарисовать те или иные рисунки.
Графические диктанты могут выполняться детьми двумя разными способами. Первый заключается в том, что ребенку дается уже готовая картинка и предлагается нарисовать точно такую же. Второй способ заключается в том, что учитель или мама диктует малышу, что нужно рисовать и произносит, сколько клеток, и в какую сторону нужно провести карандашиком.
Подготавливая дошкольников к школе, обязательно нужно обращать большое внимание на то, как развивается мелкая моторика ручек деток. Если ручки малыша будут развиты, то у него уже будет наблюдаться необходимая зрелость мозга для того, чтобы речь, мышление и письмо развивались в правильном направлении. Малыши, которые хорошо владеют своими руками, более понятливы и сообразительны. Именно для развития умения мыслить, а также для тренировки мелкой моторики рук и проводятся графические диктанты для детей младшего школьного возраста
Малыши, которые хорошо владеют своими руками, более понятливы и сообразительны. Именно для развития умения мыслить, а также для тренировки мелкой моторики рук и проводятся графические диктанты для детей младшего школьного возраста
Такие упражнения, где нужно рисовать по клеточкам, помогут воспитателям и родителям подготовить малыша к школе, развить в нем орфографическую зоркость, усидчивость и внимательность. Если по клеточкам рисовать регулярно, то у дошкольников будет развиваться пространственное воображение, координация движений, мышление, внимание и память.
Для школьников
Для деток младшего школьного возраста можно предлагать более сложные графические диктанты. Такие предложения будут полезны, если дети уже знакомы с данным упражнением и смогут легко и быстро, а главное, без ошибок, справиться с графическим диктантом поменьше.
Дети должны уже хорошо владеть знаниями, где лево-право и верх-низ, а также оперировать такими понятиями как точка, клеточка, угол и сторона. Сложный графический диктант заключается в том, что школьник должен не только правильно выполнить упражнение, чтобы на листике появилась нужная картинка, но также и сделать это максимально аккуратно и внимательно. Учитель может следить за тем, чтобы весь класс слушал его предложения по диктанту и чертил все правильно, избегая неточностей и ошибок.
Сложный графический диктант заключается в том, что школьник должен не только правильно выполнить упражнение, чтобы на листике появилась нужная картинка, но также и сделать это максимально аккуратно и внимательно. Учитель может следить за тем, чтобы весь класс слушал его предложения по диктанту и чертил все правильно, избегая неточностей и ошибок.
Животные
По клеточкам с детьми будет очень весело и занятно. Чтобы заинтересовать малышей, поговорите с ними о том, чем отличаются животные одни от других. Попробуйте внести предложения нарисовать то или иное животное, поговорите с детьми о его отличительных особенностях. Тогда графический диктант с животными по клеточкам пройдет очень хорошо.
Мы предлагаем вам попробовать нарисовать симпатичную небольшую черепашку. Поставим точку ближе в левому края листа и проведем 2 клетки вправо, 4 вниз, 1 вправо, 2 вверх, 1 вправо, 1 вверх, 4 вправо, 1 вниз, 1 право, 3 вниз, 1 влево, 1 вниз, 1 влево, 1 вверх, 4 влево, 1 вниз, 1 влево, 1 вверх, 1 влево, 3 вверх, 1 влево, 2 вверх.
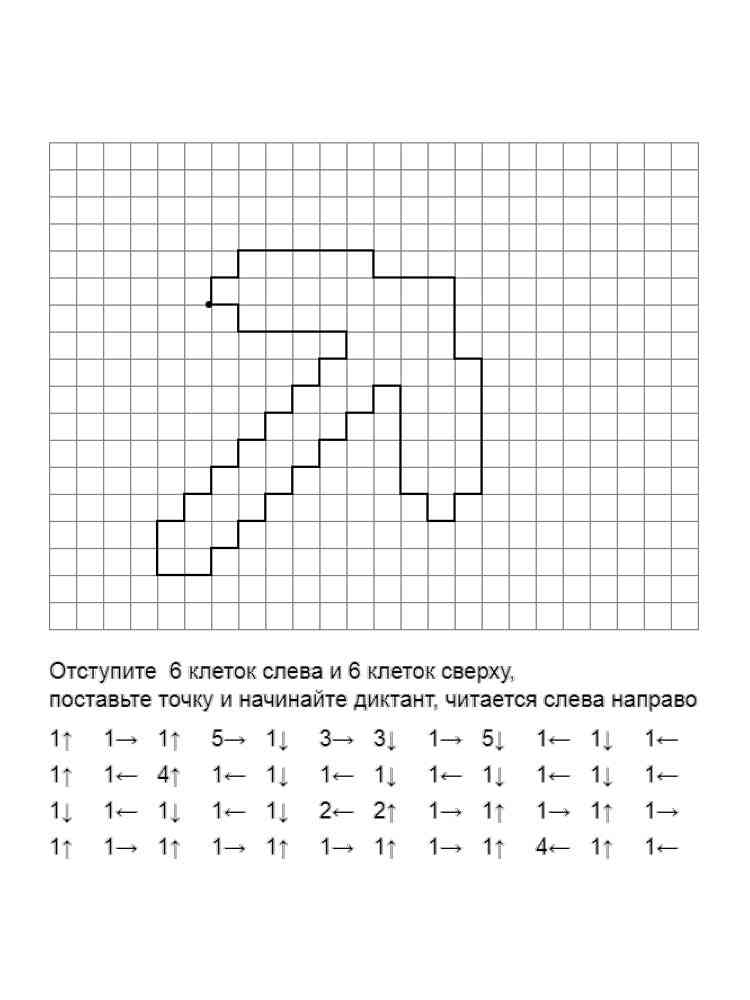
Робот
Деткам будет также интересно рисовать роботов, мы предлагаем вам средней сложности вариант рисования робота по клеточкам. Помните, что у детей во время рисования должен быть настрой на такую работы и вы, как взрослый, должны его поддерживать. Нет ничего страшного в том, что малыш может ошибиться, поправляйте его и подсказывайте ему.
Кенгуру
Скорее всего, деткам очень нравятся графические и их безумно забавляет рисовать по клеточкам. Мы предлагаем вам не слишком мудреный рисунок кенгуру и скорее всего детки не откажутся от предложения нарисовать его.
Графический диктант кенгуру
Самолет
Любые занятия с детками должны строится по принципу от простого к сложному. Берите сначала самые простенькие упражнения и постепенно подводите детей к более трудным и замудренным. Достаточно трудным считается упражнение самолет.
Узоры
Узоры как никакое другое упражнение помогает развивать малышам глазомер и мелкую моторику рук. Узоры могут быть как сложными, так и совсем простыми. Постарайтесь начинать с простеньких, а заканчивать трудными и интересными узорами.
Узоры могут быть как сложными, так и совсем простыми. Постарайтесь начинать с простеньких, а заканчивать трудными и интересными узорами.
Графический диктант 3.рисуем корабль
В последнее время рисование по клеточкам стало не только необходимым, но и самым интересным занятием для детей, которые готовятся к школе и для первоклассников. Кстати, и взрослые не против порисовать с детьми и научиться чему-то новенькому.
А вы знаете, что рисование по клеточкам, это не только увлекательное занятие, но еще и очень полезное? Особенно для 5-6 летних непосед, которым пора подготавливать руку к письму.
Преимущество рисования по клеткам
Рисование развивает логическое мышление, учит ребенка мыслить более развернуто, приучает не только к усидчивости, но и улучшает координацию движения. Это просто замечательное занятие с дошкольниками, потому что увлекательная игра превращается в полезное дело.
Подводим итоги, плюсы рисования по клеткам:
- развивает мышление и логику;
- тренирует память;
- помогает ребенку сосредоточиться;
- учит аккуратности;
- помогает тренировке руки к письму;
- развивает глазомер.
Как научиться рисованию по клеткам
Для самых маленьких разработаны специальные картинки с большими рисунками. Каждая клеточка – заполнена своим цветом. Чтобы нарисовать фигуру, нужно пройтись цветным карандашом по каждой клеточке. Этот вариант больше подходит для детей, которые только-только научились держать карандаш в руках. Чуть позже, когда ребенок научится отличать направление: вправо-влево, вверх-вниз, будет понимать, где правый и левый угол листа, можно приступать к более сложным заданиям.
Научиться рисовать по клеточкам легко, особенно если занятия проводить в игровой форме и подобрать легкие картинки для начинающих.
Что нужно для того, чтобы научиться рисовать по клеткам:
- Подобрать картинку, соответствующую возрасту ребенка.
- Объяснить и показать, как это делается.
- Предложить нарисовать точно такой же рисунок, чтобы ребенок понимал, что от него требуется.
- Чуть позже можно развивать умения ребенка, подбирая более сложные картинки: например, показать половинку рисунка и дать возможность ребенку дорисовать недостающую часть.
- Самое сложное – научиться воспринимать задания на слух и рисовать под диктовку. Например: 2 клеточки вверх, клеточка вправо, 3 клеточки вниз или вверх и так далее.
Что понадобится, чтобы рисовать по клеткам
Что подготовить и как рисовать по клеточкам:
- для самых маленьких лучше подготовить пачку цветных карандашей и тетрадку в клеточку, а также яркий и красочный образец, нарисованный взрослым. По этому образцу вместе с ребенком нужно двигаться снизу вверх, последовательно заполняя свободное пространство листика, закрашивая клеточки цветными карандашами;
- если работаете с 6-7-летним ребенком, тогда дайте ему ручку или простой карандаш, листик в клеточку с нарисованной половинкой картинки. Предложите дорисовать вторую половинку так, чтобы получился рисунок. Это может быть что-то простое: домик, кошечка, зайчик, елочка, человечек. Начинать работу лучше всего с нижней строчки, постепенно двигаясь вверх. Если видите, что ребенок ошибся, подскажите ему, пусть сразу исправит ошибку.
 На будущее научите ребенка быть повнимательнее и правильно считать клеточки;
На будущее научите ребенка быть повнимательнее и правильно считать клеточки;
- для детей школьного возраста разработаны более сложные задания, которые называются графическими диктантами. Понадобится ручка или карандаш, листик в клеточку. Взрослый диктует условия задания, ребенок отсчитывает клеточки, ориентируясь в направлении. Например, чтобы рисовать по клеточкам, необходимо научить ребенка понимать задание: цифра 1 со стрелочкой вправо означает, что нужно отступить одну клеточку право, 2 и стрелочка вниз – отступить 2 клеточки вниз и так далее.
Рисунки по клеточкам разные животные. Сложные графические диктанты по клеточкам для школьников.
Почему именно животные? Так как они лучшие друзья людей.
Дети и даже взрослые обожают их рисовать, в этой статье мы подберём несколько рисунков по рисовании рисунки по клеточкам животные
.
Их вы сможете срисовать приложив лист к монитору или отсчитав клеточки от полей листа (что более интересно! )
.
Лёгкие рисунки животных по клеточкам.
Лёгкий рисунок панды
Лёгкий рисунок головы лошади
Лёгкий рисунок собаки
Лёгкий рисунок улиток
Лёгкий рисунок медведя
Лёгкий рисунок совы
Сложные рисунки животных по клеточкам.
Здесь вы увидите подборку рисунков для более продвинутых художников.
Три сложных рисунка собачек
Очень сложный рисунок тигрёнка
Для того чтобы нарисовать этого котика, вы должны быть уже мастером рисование по клеточкам. И вам нужен будет специальный лист бумаги.
Не Совсем реальное животное. Попробуйте нарисовать пони из знаменитого мультсериала My little pony
Средней сложности котик
Несколько видео уроков по рисованию животных по клеточкам.
Заключение темы рисунки по клеточкам животные.
Обязательно попробуйте нарисовать все рисунки с нашей статьи и вы точна повысите свой уровень рисование.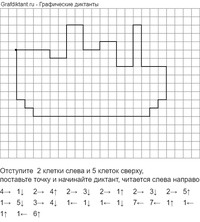 Всем удачи.
Всем удачи.
P.S p.s Если вам нравится рисовать по клеточкам то больше рисунков вы можете посмотреть тут.
Графический диктант обычно базируется на том, что на листике в клеточку нужно изобразить тот или иной рисунок, при чем очень схематично. Такое упражнение прекрасно развивает фантазию дошкольника, позволяет развивать мелкую моторику ручек ребенка, позволяет ориентироваться по сторонам, запомнить, где право-лево, верх-вниз, а также обучает ребенка тому, как можно схематично нарисовать те или иные рисунки.
Графические диктанты могут выполняться детьми двумя разными способами. Первый заключается в том, что ребенку дается уже готовая картинка и предлагается нарисовать точно такую же. Второй способ заключается в том, что учитель или мама диктует малышу, что нужно рисовать и произносит, сколько клеток, и в какую сторону нужно провести карандашиком.
Подготавливая дошкольников к школе, обязательно нужно обращать большое внимание на то, как развивается мелкая моторика ручек деток. Если ручки малыша будут развиты, то у него уже будет наблюдаться необходимая зрелость мозга для того, чтобы речь, мышление и письмо развивались в правильном направлении. Малыши, которые хорошо владеют своими руками, более понятливы и сообразительны. Именно для развития умения мыслить, а также для тренировки мелкой моторики рук и проводятся графические диктанты для детей младшего школьного возраста
Если ручки малыша будут развиты, то у него уже будет наблюдаться необходимая зрелость мозга для того, чтобы речь, мышление и письмо развивались в правильном направлении. Малыши, которые хорошо владеют своими руками, более понятливы и сообразительны. Именно для развития умения мыслить, а также для тренировки мелкой моторики рук и проводятся графические диктанты для детей младшего школьного возраста
Такие упражнения, где нужно рисовать по клеточкам, помогут воспитателям и родителям подготовить малыша к школе, развить в нем орфографическую зоркость, усидчивость и внимательность. Если по клеточкам рисовать регулярно, то у дошкольников будет развиваться пространственное воображение, координация движений, мышление, внимание и память.
Для школьников
Для деток младшего школьного возраста можно предлагать более сложные графические диктанты. Такие предложения будут полезны, если дети уже знакомы с данным упражнением и смогут легко и быстро, а главное, без ошибок, справиться с графическим диктантом поменьше.
Дети должны уже хорошо владеть знаниями, где лево-право и верх-низ, а также оперировать такими понятиями как точка, клеточка, угол и сторона. Сложный графический диктант заключается в том, что школьник должен не только правильно выполнить упражнение, чтобы на листике появилась нужная картинка, но также и сделать это максимально аккуратно и внимательно. Учитель может следить за тем, чтобы весь класс слушал его предложения по диктанту и чертил все правильно, избегая неточностей и ошибок.
Животные
По клеточкам с детьми будет очень весело и занятно. Чтобы заинтересовать малышей, поговорите с ними о том, чем отличаются животные одни от других. Попробуйте внести предложения нарисовать то или иное животное, поговорите с детьми о его отличительных особенностях. Тогда графический диктант с животными по клеточкам пройдет очень хорошо.
Мы предлагаем вам попробовать нарисовать симпатичную небольшую черепашку. Поставим точку ближе в левому края листа и проведем 2 клетки вправо, 4 вниз, 1 вправо, 2 вверх, 1 вправо, 1 вверх, 4 вправо, 1 вниз, 1 право, 3 вниз, 1 влево, 1 вниз, 1 влево, 1 вверх, 4 влево, 1 вниз, 1 влево, 1 вверх, 1 влево, 3 вверх, 1 влево, 2 вверх.
Робот
Деткам будет также интересно рисовать роботов, мы предлагаем вам средней сложности вариант рисования робота по клеточкам. Помните, что у детей во время рисования должен быть настрой на такую работы и вы, как взрослый, должны его поддерживать. Нет ничего страшного в том, что малыш может ошибиться, поправляйте его и подсказывайте ему.
Кенгуру
Скорее всего, деткам очень нравятся графические и их безумно забавляет рисовать по клеточкам. Мы предлагаем вам не слишком мудреный рисунок кенгуру и скорее всего детки не откажутся от предложения нарисовать его.
Графический диктант кенгуру
Самолет
Любые занятия с детками должны строится по принципу от простого к сложному. Берите сначала самые простенькие упражнения и постепенно подводите детей к более трудным и замудренным. Достаточно трудным считается упражнение самолет.
Узоры
Узоры как никакое другое упражнение помогает развивать малышам глазомер и мелкую моторику рук. Узоры могут быть как сложными, так и совсем простыми. Постарайтесь начинать с простеньких, а заканчивать трудными и интересными узорами.
Узоры могут быть как сложными, так и совсем простыми. Постарайтесь начинать с простеньких, а заканчивать трудными и интересными узорами.
Графический диктант 3.рисуем корабль
Правильный способ спроектировать компоновку ячейки кобота
Проектирование компоновки роботизированной ячейки иногда может показаться «темным искусством», но это не обязательно. Выполните эти четыре шага, и вы овладеете искусством в кратчайшие сроки.
Компоновка ячейки — важнейший аспект успешной роботизированной ячейки. Совершите ошибку, и вы можете серьезно снизить прирост производительности, который может принести коллаборативный робот (или «кобот»). Сделайте все правильно, и вы сможете еще больше повысить производительность своего робота.
а как лучше всего выложить клетку кобота?
Стоит ли просто закрепить робота на каком-нибудь старом столе, сложить в стопку продукты и нажать «вперед»?
Ну… нет.
Хорошая идея — потратить время на то, чтобы правильно спроектировать компоновку ячеек, используя лучшие практики из концепции Lean Robotics.
Хорошо продуманная камера — это кухня профессионального повара.
Почему расположение ячеек кажется «темным искусством»
Часто бывает трудно найти много информации о хороших схемах расположения ячеек коботов. Причина проста: поскольку каждая ячейка отличается, существует несколько жестких правил, которые будут применяться ко всем из них.
Опытные интеграторы роботов потратили годы на проектирование ячеек.Они развивают интуитивное понимание того, что делает макет эффективным. Остальным из нас это делает дизайн компоновки ячеек запутанным и загадочным — как «темное искусство».
Но так быть не должно. Расположение ячеек может быть довольно простым, если вы подойдете к нему правильно.
Мне нравится думать о планировке камеры как о кухне.
Хорошо продуманная камера — это кухня профессионального повара. Внешне она может выглядеть как любая другая кухня. Тем не менее, шеф-повар позаботится о том, чтобы его посуда, ингредиенты и рабочие места были расположены в оптимальном месте, чтобы шеф-повар мог выполнять свою работу.
Повар может быстро и легко перемещаться по помещению. Они могут найти все, что им нужно, за считанные секунды. В результате они могут приготовить профессиональное блюдо за считанные минуты.
Плохо спланированная камера — это как моя домашняя кухня. На первый взгляд, это довольно красивая кухня, которая выглядит опрятной и организованной. Однако посуда, ингредиенты и рабочие места не оптимизированы.
Мне приходится постоянно ходить взад и вперед по кухне, рыться в ящиках в поисках утвари и искать пропавшие предметы.В результате я могу приготовить приличную еду… но на это нужно время!
Если я хочу улучшить планировку своей кухни, я должен начать думать как профессиональный повар.
Точно так же, если вы хотите создать лучшую клетку коботов, вы должны начать думать как коллаборативный робот.
Спросите себя: где должны быть размещены все инструменты, детали и рабочие места, чтобы кобот мог работать наиболее эффективно?
Как спроектировать клетку кобота за четыре этапа
Есть четыре шага к проектированию компоновки ячеек, первые три из которых следует выполнить до того, как вы даже подумаете о физической компоновке.
(Эти три шага выполняются на этапе проектирования любого проекта коботов и подробно описаны в книге «Бережливая робототехника».)
Четыре этапа проектирования компоновки ячеек:
1. Проанализируйте и определите ручную карту задач
Большинство приложений для совместной работы роботов запускаются вручную. Идея здесь состоит в том, чтобы использовать вашу ручную задачу в качестве отправной точки для роботизированной ячейки.
Вы должны начать с анализа того, как работники в настоящее время выполняют задачу.В концепции Lean Robotics этот процесс состоит из семи этапов:
- Определите «покупателя» ячейки. — Начните анализ в конце. Считается, что клиент ячейки будет следующей ячейкой в вашем процессе.
- Определите ценный выход —Какие входные данные нужны ячейке клиента? Это результат вашей ячейки.
- Определите входные данные —Какие входные данные необходимы вашей ячейке из предыдущих ячеек в процессе?
- Опишите ручной процесс.
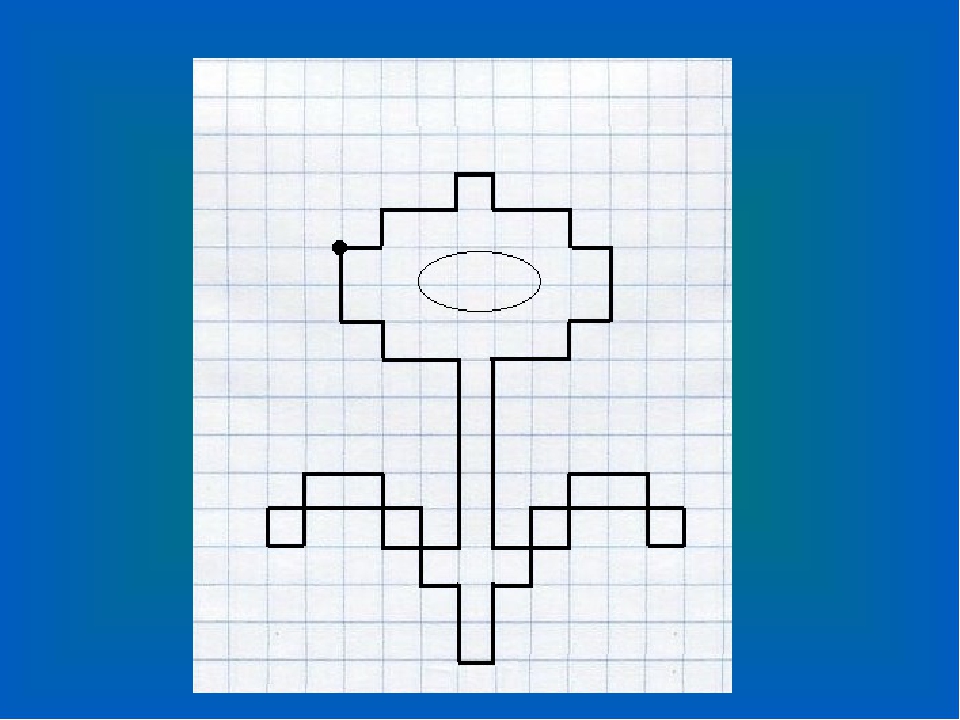 — Здесь вы должны перечислить все шаги, которые выполняет человек-оператор.В этом списке описаны задачи, которые вы будете пытаться выполнить позже с помощью робота.
— Здесь вы должны перечислить все шаги, которые выполняет человек-оператор.В этом списке описаны задачи, которые вы будете пытаться выполнить позже с помощью робота. - Документируйте поток информации — Как информация передается в ячейку и из ячейки? Как на этот поток информации повлияет появление робота?
- Измерение ключевых показателей эффективности ячейки —Установите цели для ячейки и определите, как их измерять.
- Обобщите ручную карту задач —Соберите всю информацию, которую вы нашли на визуальной карте.
Этот процесс, который подробно описан в книге «Бережливая робототехника», дает вам много информации, которую вы можете использовать для создания своей роботизированной ячейки.
2. Запустить карту задач робота
Затем вы хотите «перевести» ручную задачу так, чтобы ее мог выполнять робот. Для этого вы создадите роботизированную карту задач. Как и в случае с ручной картой, создание роботизированной карты задач состоит из семи шагов.
Вы можете подумать, что не можете определить карту задач, не разработав сначала макет… и вы правы. Однако проблема в том, что вы также не можете разработать макет, пока не определите карту задач!
Это ставит нас в тупик.
Решение состоит в том, чтобы развивать их в тандеме. Начните с определения вашей высокоуровневой карты задач. Затем сформируйте подробную карту задач, когда начнете разрабатывать макет.
3. Определите карту задач высокого уровня
Карта задач высокого уровня определяет физические компоненты, которые вам понадобятся. К ним относятся сам робот, инструменты, меры безопасности, датчики и программное обеспечение.
Определите эти высокоуровневые компоненты, прежде чем вы начнете составлять физический план ячейки.
4. Разработайте макет (и обновите карту задач)
Наконец, вы готовы к разработке макета.
Я рекомендую начать с физического шага через задание, используя руку и руку вместо робота. Этот шаг занимает всего несколько минут, но он может сэкономить часы вашего времени разработки.
Этот шаг занимает всего несколько минут, но он может сэкономить часы вашего времени разработки.
На самом деле, это одна из замечательных идей, которые были получены в результате нашего 24-часового конкурса на конференции пользователей Robotiq в прошлом году! Команда-победитель обнаружила, что выполнение задачи сначала сэкономило им много времени и усилий.
Затем решите, где нужно разместить робота, объекты и рабочие места, чтобы робот мог работать наиболее эффективно.
Обратите внимание на физические свойства робота, особенно на его «досягаемость» — это определит, насколько далеко объекты могут быть от робота.
Как только у вас появится хорошее представление о расположении ячеек, нарисуйте его на бумаге.
Наконец, пересмотрите свой план. Постарайтесь свести к минимуму расстояния, которые должен преодолеть робот. Это снизит время цикла задачи и увеличит производительность робота.Вы также должны рассмотреть альтернативные схемы расположения ячеек, на всякий случай, если есть способ улучшить вашу ячейку, о котором вы раньше не думали.
Следуя этому простому процессу, вы будете на правильном пути к овладению не таким уж мрачным искусством компоновки ячеек коботов.
Хотите попробовать? Загрузите шаблон сопоставления задач на Leanrobotics.org.
Исследователи используют лабораторные культуры для создания роботов-«полуживых художников» — ScienceDaily
Работая в своих университетских лабораториях в двух разных уголках мира, U.С. и австралийские исследователи создали то, что они называют новым классом творческих существ, «полуживым художником» — робота-рисовальщика в Перте, Австралия, движения которого контролируются сигналами мозга культивируемых клеток крысы в Атланте.
Захватывая три цветных маркера, расположенных над белым холстом, роботизированная рука для рисования работает на основе нейронной активности нескольких тысяч нейронов крысы, помещенных в специальную чашку Петри, которая поддерживает жизнь клеток. Чашка, многоэлектродная матрица (MEA), оснащена 60 двусторонними электродами для связи между нейронами и внешней электроникой. Нейронные сигналы записываются и отправляются в компьютер, который переводит нейронную активность в движение робота.
Нейронные сигналы записываются и отправляются в компьютер, который переводит нейронную активность в движение робота.
Сеть клеток мозга, расположенная в лаборатории профессора Стива Поттера в Технологическом институте Джорджии в Атланте, и механическая рука, расположенная в лаборатории Гая Бен-Ари в Университете Западной Австралии в Перте, взаимодействуют в режиме реального времени. через систему обмена данными через Интернет-соединение между роботом и клетками мозга.
И хотя рисунки роботов не заставят художников потерять работу (представьте себе творческие каракули трехлетнего ребенка), работа полуживого художника имеет более глубокое значение.Команда надеется преодолеть разрыв между биологическими и искусственными системами, чтобы создать машину, способную сопоставить интеллект даже самого простого организма.
«Мы пытаемся создать сущность, которая со временем будет развиваться, учиться и выражать себя через искусство», — сказал Поттер, профессор кафедры биомедицинской инженерии Уоллеса Х. Култера в Технологическом институте Джорджии и Университете Эмори.
Култера в Технологическом институте Джорджии и Университете Эмори.
Поттер и его команда из Лаборатории нейроинженерии Технологического института Джорджии начали сотрудничать с командой Бен-Ари в Западной Австралии в 2002 году.Они называют робота «MEART», что означает искусство многоэлектродных массивов. Этот проект сочетает в себе технологию многоэлектродных решеток в лаборатории Поттера с роботизированной и художественной изобретательностью команды из Западной Австралии, названной «Исследовательская группа SymbioticA».
В то время Бен-Ари и его группа проводили исследования по объединению биологических технологий и артистизма в проекте под названием «Fish & Chips». В этом проекте команда использовала музыку для стимуляции электрической активности нескольких нейронов рыб, выращенных на кремниевых чипах, которые, в свою очередь, управляли роботизированной рукой.
«Цели состоят в том, чтобы больше узнать о том, как работает мозг, и применить полученные знания для проектирования принципиально различных типов систем искусственных вычислений», — сказал Бен-Ари, руководящий отделом сбора и анализа изображений в Школе анатомии и человека. Биология в Западной Австралии.
Биология в Западной Австралии.
Тем временем группа Поттера уже соединяла культуры, содержащие живые нейроны, с компьютерами, используя многоэлектродные матрицы, которые стимулируют и регистрируют нейроны млекопитающих.В частности, группа разработала первое роботизированное устройство, движения которого контролируются культурной нейронной сетью, способной к адаптивному поведению и обучению. Они называют гибридного робота «Гиброт».
Нейронная активность, регистрируемая электродами, передается по системе двусторонней связи и обрабатывается как в Атланте, так и в Перте для управления роботизированной рукой. В зависимости от того, как возникает нейро-электрическая активность, роботизированная рука будет рисовать на части холста или выбирать, сколько цветных маркеров использовать одновременно и какие цвета она будет использовать.
Центральное место в экспериментах занимает вера Поттера в то, что со временем команды смогут создать культивированную сетевую систему in vitro, которая будет обучаться, как живой мозг людей и животных. Для этого информация от датчиков робота отправляется обратно через систему в культивируемую сеть клеток в виде электрических стимулов. Замыкая цикл, группа надеется, что робот узнает что-нибудь о себе и своем окружении.
Для этого информация от датчиков робота отправляется обратно через систему в культивируемую сеть клеток в виде электрических стимулов. Замыкая цикл, группа надеется, что робот узнает что-нибудь о себе и своем окружении.
«Я надеюсь, что это слияние искусства и науки заставит художников задуматься о нашей науке, а ученых — о том, что такое искусство и какой минимум необходим для создания творческой сущности», — сказал Поттер.«Что касается науки, я надеюсь, что мы сможем взглянуть на сделанные им рисунки и увидеть некоторые свидетельства обучения. Затем мы сможем тщательно изучить культивируемую сеть под микроскопом, чтобы помочь понять процесс обучения на клеточном уровне».
Исследовательская группа SymbioticA в Университете Западной Австралии находится под управлением Орона Кэттса и профессоров Миранды Граундс и Стюарта Бунта из Школы анатомии и биологии человека. Фил Гэмблен разработал роботизированную руку.
###
Примечание. Полуживой художник будет представлен на выставке «ArtBots: The Robot Talent Show» (http: // artbots. org) в Нью-Йорке 12 и 13 июля в галерее Eyebeam.
org) в Нью-Йорке 12 и 13 июля в галерее Eyebeam.
История Источник:
Материалы предоставлены Технологическим институтом Джорджии . Примечание. Содержимое можно редактировать по стилю и длине.
Крошечные роботы с магнитным управлением коаксиальными нейронами для подключения
Крошечные роботы могут работать как соединители нервных клеток, перекрывая промежутки между двумя отдельными группами клеток. Эти микроскопические пятна могут привести к более изощренным способам выращивания сетей нервных клеток в лаборатории и, возможно, даже пролить свет на способы восстановления поврежденных нервных клеток у людей, сообщают исследователи 25 сентября в журнале Science Advances .
Инженеры Ынхи Ким и Хонгсу Чой из Института науки и технологий Тэгу Кёнбук в Южной Корее и их коллеги впервые построили прямоугольных роботов длиной 300 микрометров. Сверху выстроились тонкие горизонтальные бороздки шириной примерно с усики нервных клеток, которые обмениваются сообщениями с другими клетками.
Исследователи обнаружили, что эти микророботы были благодатной почвой для нервных клеток крыс. По мере роста клеток их передающие сообщения аксоны и принимающие сообщения дендриты аккуратно следовали за бороздками роботов.
Когда-то загруженный примерно 100 нервными клетками, микроробот должен был устроиться между двумя отдельными островками нервных клеток, выращенных на стеклянных пластинах, и преодолеть разрыв. Вращающиеся магнитные поля отправили микроробота кувырком к своей цели. Когда микроробот приблизился, исследователи использовали более устойчивое магнитное поле, чтобы выровнять бота между двумя кластерами клеток.
Микроробот, несущий нервные клетки (центральный мост), соединяет два отдельных кластера нервных клеток (тела клеток на этой микрофотографии окрашены в зеленый цвет, ядра — в синий цвет), позволяя этим кластерам взаимодействовать.Юнхи Ким, Хонгсу Чой Нервные клетки микроробота затем выросли в сторону кластеров, в то время как клетки в кластерах выросли на боте. Эти новые связи позволили нейронным сигналам течь от одного кластера нервных клеток к другому, как показали электроды.
Создание этих нейронных мостов может помочь исследователям создать более точные копии сложных сетей нервных клеток в головном мозге. Подобные системы могут также привести к новым способам изучения роста нервных клеток, экспериментам, которые в конечном итоге могут указать на методы лечения людей с повреждениями нервов ( SN: 8/11/16 ).Такое прецизионное построение также может быть полезно в вычислениях, позволяя ученым проектировать и создавать биологические компьютеры с нервными клетками.
Подпишитесь на последние новости от
Science NewsЗаголовки и резюме последних научных новостей статей, доставленных на ваш почтовый ящик
ученых использовали стволовые клетки лягушек для создания первых живых роботов | Наука
Будьте осторожны. Если рост роботов произойдет, апокалипсис может оказаться более жестоким делом, чем нас подготовили писатели-фантасты.
Исследователи из США создали первые живые машины, собрав клетки африканских когтистых лягушек в крошечных роботов, которые передвигаются под собственным паром.
Одно из самых удачных творений имеет две короткие ноги, которые толкают его на «груди». У другого есть отверстие посередине, которое исследователи превратили в мешочек, чтобы он мог перемещаться с миниатюрными полезными грузами.
«Это совершенно новые формы жизни. Их никогда раньше не было на Земле », — сказал Майкл Левин, директор Центра открытий Аллена в Университете Тафтса в Медфорде, штат Массачусетс.«Это живые программируемые организмы».
Робототехники предпочитают металл и пластик из-за их прочности и долговечности, но Левин и его коллеги видят преимущества в создании роботов из биологических тканей. При повреждении живые роботы могут залечивать свои раны, и, как только их задача выполнена, они разваливаются, как естественные организмы разлагаются, когда умирают.
графический Их уникальные особенности означают, что будущие версии роботов могут быть развернуты для очистки океанов от микропластических загрязнений, обнаружения и переваривания токсичных материалов, доставки лекарств в организм или удаления зубного налета со стенок артерий, говорят ученые.
«Невозможно узнать, какие приложения будут применены к какой-либо новой технологии, поэтому мы можем только догадываться», — сказал Джошуа Бонгард, старший научный сотрудник команды Университета Вермонта.
Роботы длиной менее 1 мм созданы по «эволюционному алгоритму», который работает на суперкомпьютере. Программа начинается с создания случайных трехмерных конфигураций от 500 до 1000 клеток кожи и сердца. Затем каждая конструкция тестируется в виртуальной среде, например, чтобы увидеть, как далеко она перемещается, когда клетки сердца начинают биться.Лучшие исполнители используются для создания большего количества дизайнов, которые затем подвергаются испытанию.
Поскольку сердечные клетки спонтанно сокращаются и расслабляются, они ведут себя как миниатюрные двигатели, которые приводят в движение роботов, пока их запасы энергии не иссякнут. Внутри ячеек достаточно топлива, чтобы роботы могли прожить от недели до 10 дней, прежде чем упасть.
Ученые подождали, пока компьютер произведет 100 поколений, прежде чем выбрать несколько проектов для сборки в лаборатории. Они использовали пинцет и инструменты для прижигания, чтобы вылепить ранние стадии кожи и клеток сердца, соскобленных с эмбрионов африканских когтистых лягушек, Xenopus laevis . Источник клеток побудил ученых назвать свои творения «ксеноботами».
Они использовали пинцет и инструменты для прижигания, чтобы вылепить ранние стадии кожи и клеток сердца, соскобленных с эмбрионов африканских когтистых лягушек, Xenopus laevis . Источник клеток побудил ученых назвать свои творения «ксеноботами».
В «Трудах Национальной академии наук» исследователи описывают, как они отпускали роботов в посуду с водой, чтобы клетки лягушки оставались живыми. Некоторые ползли по прямым линиям, в то время как другие двигались по кругу или объединялись с другими, когда двигались.
«Они очень маленькие, но в конечном итоге планируется масштабировать их», — сказал Левин. Ксеноботы могут состоять из кровеносных сосудов, нервной системы и сенсорных клеток, чтобы сформировать рудиментарные глаза. Создавая их из клеток млекопитающих, они могли жить на суше.
Сэм Кригман, аспирант в команде Университета Вермонта, признал, что работа подняла этические проблемы, особенно с учетом того, что будущие варианты могут иметь нервную систему и быть отобраны по когнитивным способностям, что сделает их более активными участниками в мире.![]() «Для меня важно то, что это публично, чтобы мы могли обсудить это, поскольку общество и политики могут решить, как лучше всего действовать».
«Для меня важно то, что это публично, чтобы мы могли обсудить это, поскольку общество и политики могут решить, как лучше всего действовать».
Его меньше беспокоили ксеноботы, представляющие угрозу человечеству. «Если вы посмотрите видео, то трудно опасаться, что эти вещи возьмут верх в ближайшее время», — сказал он.
Но работа направлена на достижение большего, чем просто создание мягких роботов.«Наша цель — понять программное обеспечение жизни», — сказал Левин. «Если вы думаете о врожденных дефектах, раке, возрастных заболеваниях, все эти проблемы можно решить, если бы мы знали, как создавать биологические структуры, чтобы иметь полный контроль над ростом и формой».
Исследование финансируется программой машинного обучения Агентства перспективных исследовательских проектов Министерства обороны США, которая направлена на воссоздание процессов биологического обучения в машинах.
Томас Дуглас, старший научный сотрудник Оксфордского центра практической этики Уэхиро, сказал: «Есть интересные этические вопросы относительно морального статуса этих ксеноботов.В какой момент они станут существами, интересы которых следует защищать? Я думаю, что они приобрели бы моральное значение только в том случае, если бы включали в себя нервную ткань, которая обеспечивала некую психическую жизнь, например способность испытывать боль.
«Но некоторые более либеральны в отношении морального статуса. Они думают, что у всех живых существ есть интересы, которые следует учитывать с моральной точки зрения. У этих людей могут возникнуть сложные вопросы о том, следует ли классифицировать этих ксеноботов как живые существа или машины.”
НОВОСТЕЙ BBC | Наука / Природа | Робот с мозгом крысы занимается далеким искусством
Познакомьтесь с новейшим современным художником — роботом-манипулятором из Австралии, чей мозг находится в чашке Петри в США.

|
Рука робота находится в Перте … |
Работая в своих университетских лабораториях в двух разных уголках мира, американские и австралийские исследователи создали то, что они называют новым классом творческих существ: «полуживые художники».
Захватывая три цветных маркера, расположенных над белым холстом, роботизированная рука штампует рисунки, похожие на рисунки трехлетнего ребенка. Его руководство исходит от примерно 50 000 нейронов крысы в чашке Петри на расстоянии 19 000 километров.
«Мозг» живет в лаборатории доктора Стива Поттера в Технологическом институте Джорджии в Атланте, а «тело» находится в лаборатории Гая Бен-Ари в Университете Западной Австралии в Перте.
Стимуляция веб-камеры
Два конца обмениваются данными друг с другом в режиме реального времени через Интернет.
Проект представляет собой усилия команды по созданию полуживого существа, которое учится, как живой мозг людей и животных, адаптируясь и выражая себя через искусство.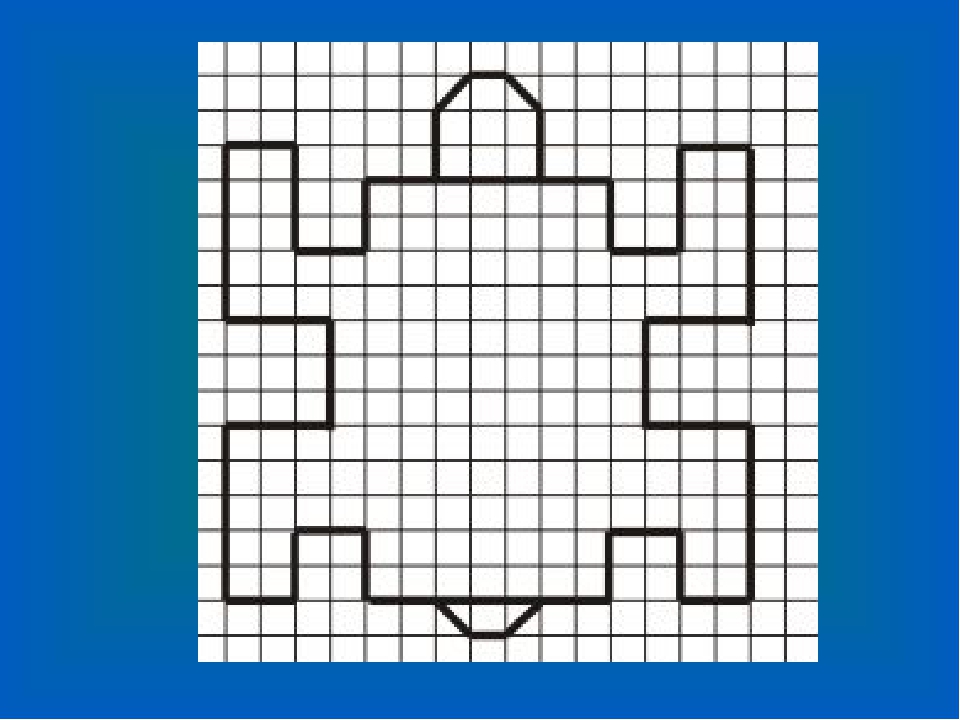
|
… но мозг находится в Атланте |
«Это действительно заставляет задуматься о будущих возможностях и понять, что научно-фантастическое видение таких фильмов, как« Холодный Лазарь », может превратиться в реальность в будущем».
Названный Meart (Multi-Electrode Array Art), клетки подключаются через 64 двусторонних электрода к компьютеру и стимулируются информацией; в этом случае передача уменьшенных изображений посетителей в его окрестностях, снятых с помощью веб-камеры.
Учись немного
Компьютер переводит любую результирующую нейронную активность в движение руки робота.Замыкая цикл, исследователи надеются, что крысиная культура узнает что-то о себе и окружающей среде.
«Я бы не стал классифицировать [клетки] как« разум », хотя мы надеемся найти способы позволить им учиться и стать хотя бы немного умными», — сказал доктор Поттер.
|
Рисунки становятся менее хаотичными |
Доктор Поттер надеется, что это предприятие предоставит ценную информацию о том, как обучение происходит на клеточном уровне.
Последней инициативой является развитие проекта SymbioticA Fish And Chips, в котором художники-ученые выращивали нейроны рыбы над кремниевыми чипами для управления роботизированной рукой, которая воспроизводила рисунки и музыку.
Интегрированная робототехника увеличивает производительность LaserBond
В капиталоемких отраслях промышленности используются установки и оборудование, работающие с максимальной эффективностью, которая часто снижается из-за износа и коррозии основных компонентов. Лазерная наплавка может быть эффективным средством повышения производительности и долговечности оборудования, которое подвержено износу и коррозии в промышленных условиях.
Лазерная наплавка может быть эффективным средством повышения производительности и долговечности оборудования, которое подвержено износу и коррозии в промышленных условиях.
Лазерная наплавка — это процесс аддитивного производства. Он позволяет добавлять металлические или композитные слои с высокими эксплуатационными характеристиками с металлургической связью к новым или модернизированным компонентам, чтобы обеспечить повышенную защиту от износа и коррозии.
Износ компонентов может существенно повлиять на производительность и общую стоимость владения основным оборудованием.
Оборудование и компоненты подвержены удалению материала с помощью ряда механизмов, включая истирание, эрозию, коррозию, кавитацию, нагрев и удар, а также любые комбинации этих механизмов износа — поэтому индивидуальная обработка поверхности продлит срок службы компонента и улучшит его характеристики.
LaserBond — австралийская компания, специализирующаяся на проектировании поверхностей, которая разработала инновационные решения и системы для лазерной наплавки для использования в различных отраслях промышленности.
Компания осознала ценность инвестиций в новые технологии для повышения производительности роботизированных лазерных ячеек, используемых в процессе лазерной наплавки.
Упрощение настройки
Драйверы для автоматизации различаются в зависимости от приложения, но обычно направлены на повышение эффективности и производительности производства.В случае лазерной наплавки важна автоматизация, поскольку процесс возможен только при точном управлении движением робота и, следовательно, не может выполняться вручную.
Уэйн Хупер, генеральный директор LaserBond, объясняет: «Каждая работа по лазерной наплавке индивидуальна, поэтому нам действительно нужны системы автоматизации, удобные для операторов. Они должны быть простыми в настройке, с четкими инструкциями по безопасному управлению роботом, внешним осям, управлению лазером и сопутствующему оборудованию.”
Чтобы повысить скорость и точность процесса настройки для различных работ, LaserBond поручил Rockwell Automation предоставить оборудование и системы для помощи в разработке удобных для пользователя средств управления, которые сокращают время настройки и, следовательно, повышают производительность.
Задача заключалась в том, чтобы упростить управление каждой роботизированной ячейкой для лазерной наплавки, чтобы оператор мог настраивать каждое задание без необходимости редактировать код робота.
Первая в мире «живая машина», созданная с использованием лягушачьих клеток и искусственного интеллекта
Что происходит, когда вы берете клетки из эмбрионов лягушки и выращиваете из них новые организмы, которые были «эволюционированы» с помощью алгоритмов? Вы получаете то, что исследователи называют первой в мире «живой машиной».
Хотя оригинальные стволовые клетки были получены от лягушек — африканской когтистой лягушки, Xenopus laevis — эти так называемые ксеноботы не похожи ни на какие известные амфибии. Крошечные капли имеют ширину всего 0,04 дюйма (1 миллиметр) и состоят из живой ткани, которую биологи собрали в тела, созданные с помощью компьютерных моделей, согласно новому исследованию.
Эти мобильные организмы могут перемещаться независимо и коллективно, могут самостоятельно лечить раны и выживать в течение нескольких недель, и потенциально могут быть использованы чтобы транспортировать лекарства внутри тела пациента, как недавно сообщили ученые.
Связано: Шесть самых странных роботов, когда-либо созданных
«Они не являются ни традиционными роботами, ни известными видами животных», — соавтор исследования Джошуа Бонгард, ученый-компьютерщик и эксперт по робототехнике из Университета. из Вермонта, говорится в заявлении . «Это новый класс артефактов: живой, программируемый организм».
Алгоритмы сформировали эволюцию ксеноботов. По словам ведущего автора исследования Сэма Кригмана, докторанта, изучающего эволюционную робототехнику на факультете компьютерных наук Университета Вермонта в Берлингтоне, они выросли из стволовых клеток кожи и сердца в тканевые скопления из нескольких сотен клеток, которые двигались импульсами, генерируемыми тканью сердечной мышцы .
«Нет никакого внешнего управления с пульта дистанционного управления или биоэлектричества. Это автономный агент — это почти как заводная игрушка», — сказал Кригман Live Science.
Биологи задали компьютеру ограничения для автономных ксеноботов, такие как максимальная мышечная сила их тканей и то, как они могут перемещаться в водной среде.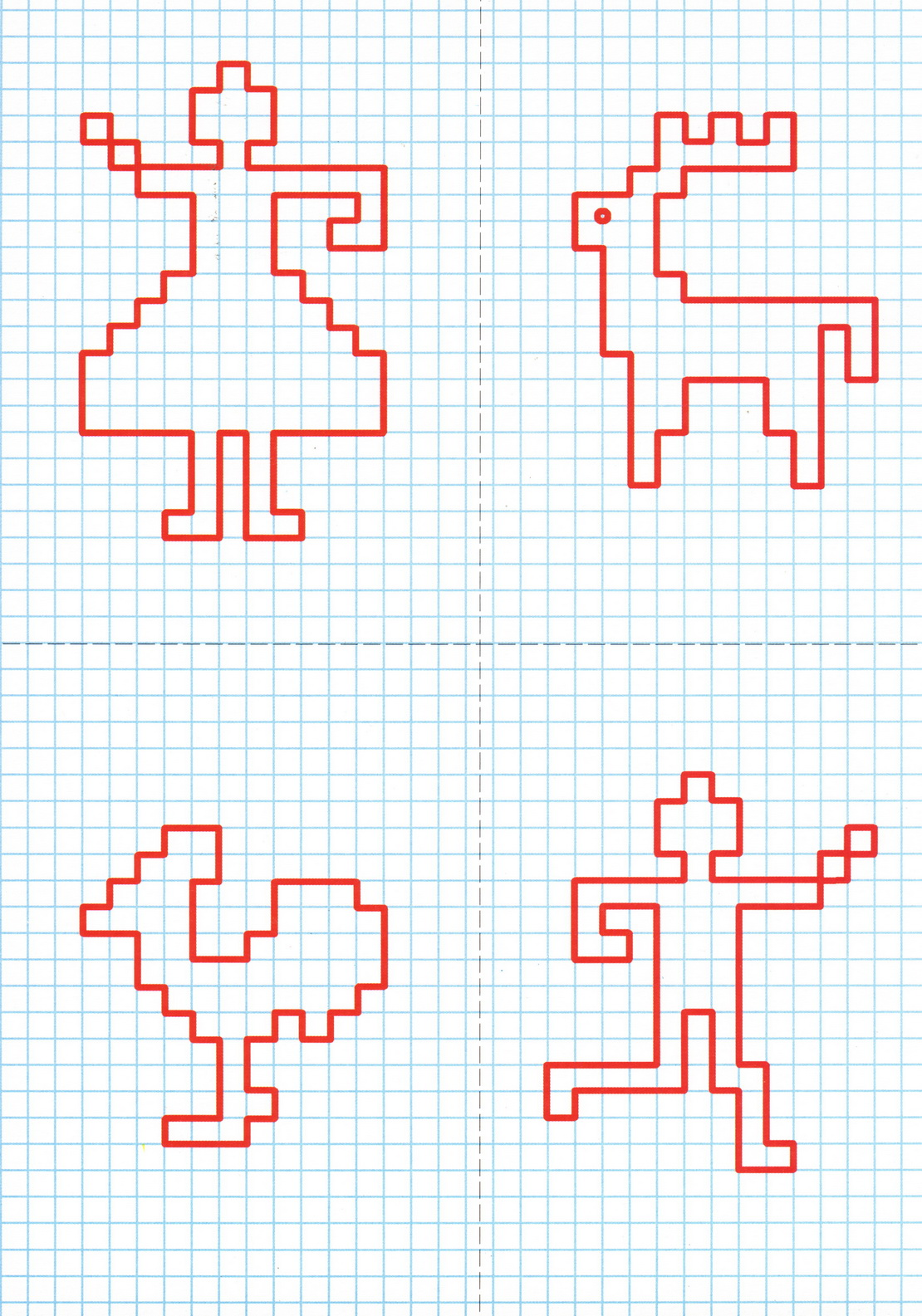 Затем алгоритм произвел поколения крошечных организмов. Наиболее эффективные боты «воспроизводятся» внутри алгоритма. И так же, как эволюция работает в естественном мире, наименее успешные формы будут удалены компьютерной программой.
Затем алгоритм произвел поколения крошечных организмов. Наиболее эффективные боты «воспроизводятся» внутри алгоритма. И так же, как эволюция работает в естественном мире, наименее успешные формы будут удалены компьютерной программой.
«В конце концов, компания смогла предоставить нам конструкции, которые можно было перенести на реальные клетки. Это был прорыв», — сказал Кригман.
Затем авторы исследования воплотили эти конструкции в жизнь, соединяя стволовые клетки вместе, чтобы сформировать автономные трехмерные формы, разработанные с помощью алгоритма эволюции. Согласно исследованию, клетки кожи удерживали ксеноботов вместе, и биение сердечной ткани в определенных частях их «тел» продвигало ботов через воду в чашке Петри в течение нескольких дней и даже недель подряд, без потребности в дополнительных питательных веществах. .По словам Кригмана, боты смогли даже устранить значительный ущерб.
«Мы разрезали живого робота почти пополам, и его клетки автоматически застегнули его тело», — сказал он.
«Мы можем представить себе множество полезных приложений этих живых роботов, которые не могут сделать другие машины», — сказал соавтор исследования Майкл Левин, директор Центра регенеративной биологии и биологии развития Университета Тафтса в Массачусетсе. Они могут включать в себя нацеливание на разливы токсичных веществ или радиоактивное загрязнение , сбор морских микропластиков или даже выкапывание бляшек из артерий человека, говорится в заявлении Левина.
Творения, стирающие грань между роботами и живыми организмами, являются популярными предметами в научной фантастике; подумайте о машинах-убийцах из фильмов «Терминатор» или репликантах из мира «Бегущего по лезвию». По словам Левина, перспектива так называемых живых роботов и использование технологий для создания живых организмов по понятным причинам вызывает беспокойство у некоторых.
«Этот страх небезоснователен», — сказал Левин. «Когда мы начнем возиться со сложными системами, которых не понимаем, мы столкнемся с непредвиденными последствиями.
Тем не менее, создание простых органических форм, таких как ксеноботы, также может привести к полезным открытиям, добавил он.
«Если человечество собирается выжить в будущем, нам нужно лучше понять, как сложные свойства каким-то образом возникают из простых правил «, — сказал Левин.
Результаты были опубликованы в Интернете 13 января в журнале Proceedings of the National Academy of Sciences .
Первоначально опубликовано на Live Science .
Хотите больше науки? Получите подписку на наше родственное издание , журнал «Как это работает» , чтобы получать последние удивительные новости науки. (Изображение предоставлено Future plc) .
